Phân tích và tháo rời đơn giản chiếc drone DJI Mini 2
Một thời gian trước, tôi nhận thấy tín hiệu truyền hình ảnh không dây 5.8GHz của chiếc drone DJI Mini 2 mua cách đây bốn năm hoạt động rất yếu. Sau khi tìm kiếm trên mạng, hiện tượng này được cho là do chip khuếch đại công suất không dây 5.8G bị lỗi, một vấn đề được cho là khá phổ biến. Vì sản phẩm đã hết thời hạn bảo hành, tôi quyết định tự tháo máy và thay thế linh kiện.
Lưu ý: Một số thông tin về chip trong bài viết có thể được tạo bởi AI!
Đánh giá và mở hộp đơn giản chiếc drone DJI Mavic Mini 2: https://blog.zeruns.com/archives/650.html
Các bài viết phân tích tháo rời khác
- Đánh giá và mở hộp đơn giản GL-RM1PE: https://blog.zeruns.com/archives/900.html
- Phân tích thiết kế mạch và tháo rời đèn chụp ảnh ZGRL-80: https://blog.zeruns.com/archives/882.html
- Tháo rời ZTE F7015TV3 2.5G ONU: https://blog.zeruns.com/archives/797.html
- Phân tích tháo rời bộ lưu điện (UPS) Leadise D1500: https://blog.zeruns.com/archives/792.html
- Thử nghiệm và tháo rời bộ sạc 120W giá 2,6 Nhân dân tệ từ Mall Douyin: https://blog.zeruns.com/archives/786.html
- Đánh giá và tháo rời máy chủ nhỏ Apple Mac Mini M4: https://blog.zeruns.com/archives/851.html
Quy trình tháo rời
Tháo các ốc vít chéo xung quanh đáy drone.

Tháo pin và bẩy các chốt khóa vỏ ở hai bên bên trong ngăn chứa pin.

Sau đó có thể tháo nắp trên của vỏ. Ở giữa, bạn có thể thấy anten GPS gốm.
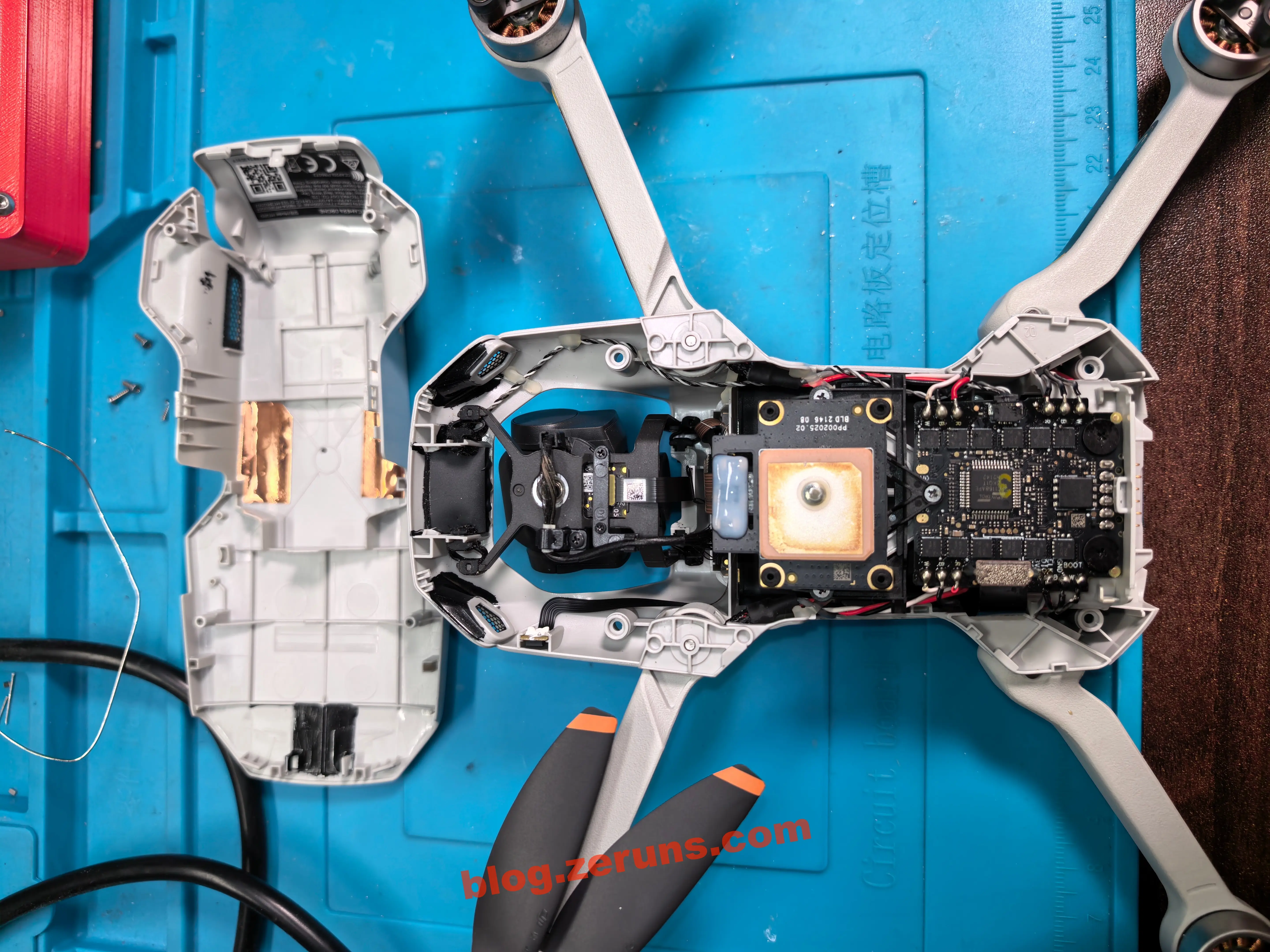
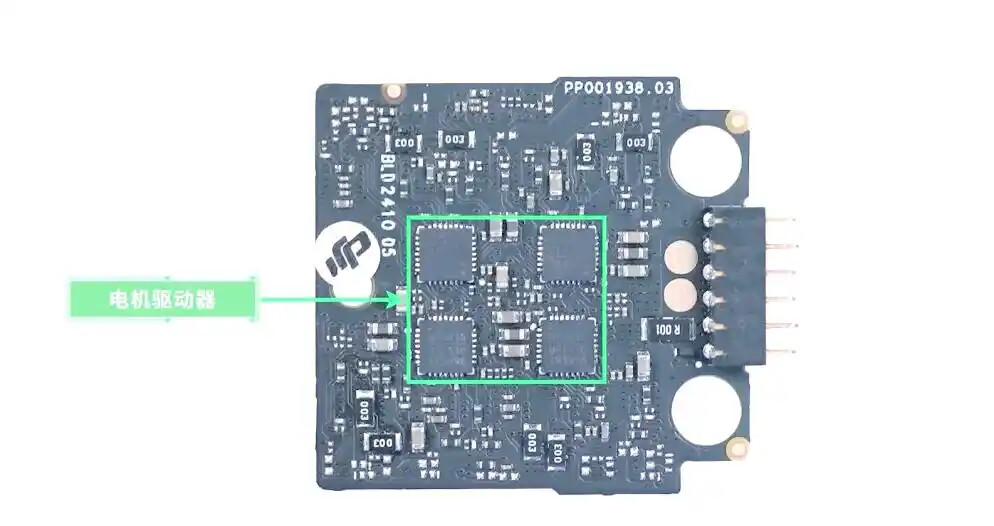
Bảng mạch dưới anten GPS là bảng điều khiển động cơ một chiều không chổi than (BLDC) không cảm biến ba pha. Mô hình chip ở giữa bảng mạch là SPC1168APE48, một vi điều khiển SoC (System-on-Chip) tích hợp cao của SPINTROL, được sử dụng để điều khiển động cơ, điều chỉnh các tranzito hiệu ứng trường (MOSFET) xung quanh nhằm vận hành động cơ.
SPC1168 được trang bị lõi ARM Cortex-M4 32-bit hiệu suất cao với tần số xung nhịp lập trình tối đa 200MHz, 64KB SRAM, 128KB FLASH tích hợp, cùng nhiều tài nguyên I/O và ngoại vi nâng cao. Nó tích hợp bộ chuyển đổi tương tự-số (ADC) 14-bit, 3 bộ khuếch đại điều chỉnh được, 6 mô-đun PWM nâng cao, 3 bộ định thời 32-bit đa dụng và các giao diện truyền thông như UART, I2C, SPI, biến nó thành nền tảng lý tưởng cho ứng dụng điều khiển động cơ. Ngoài ra, nó áp dụng hai công nghệ đổi mới: một là công nghệ bảo mật đa vùng để nâng cao bảo vệ mã nguồn; hai là công nghệ IO linh hoạt tương tự FPGA, cho phép cấu hình IO thành các ngoại vi khác nhau nhằm đáp ứng đa dạng nhu cầu ứng dụng nhưng vẫn đảm bảo hiệu quả chi phí.

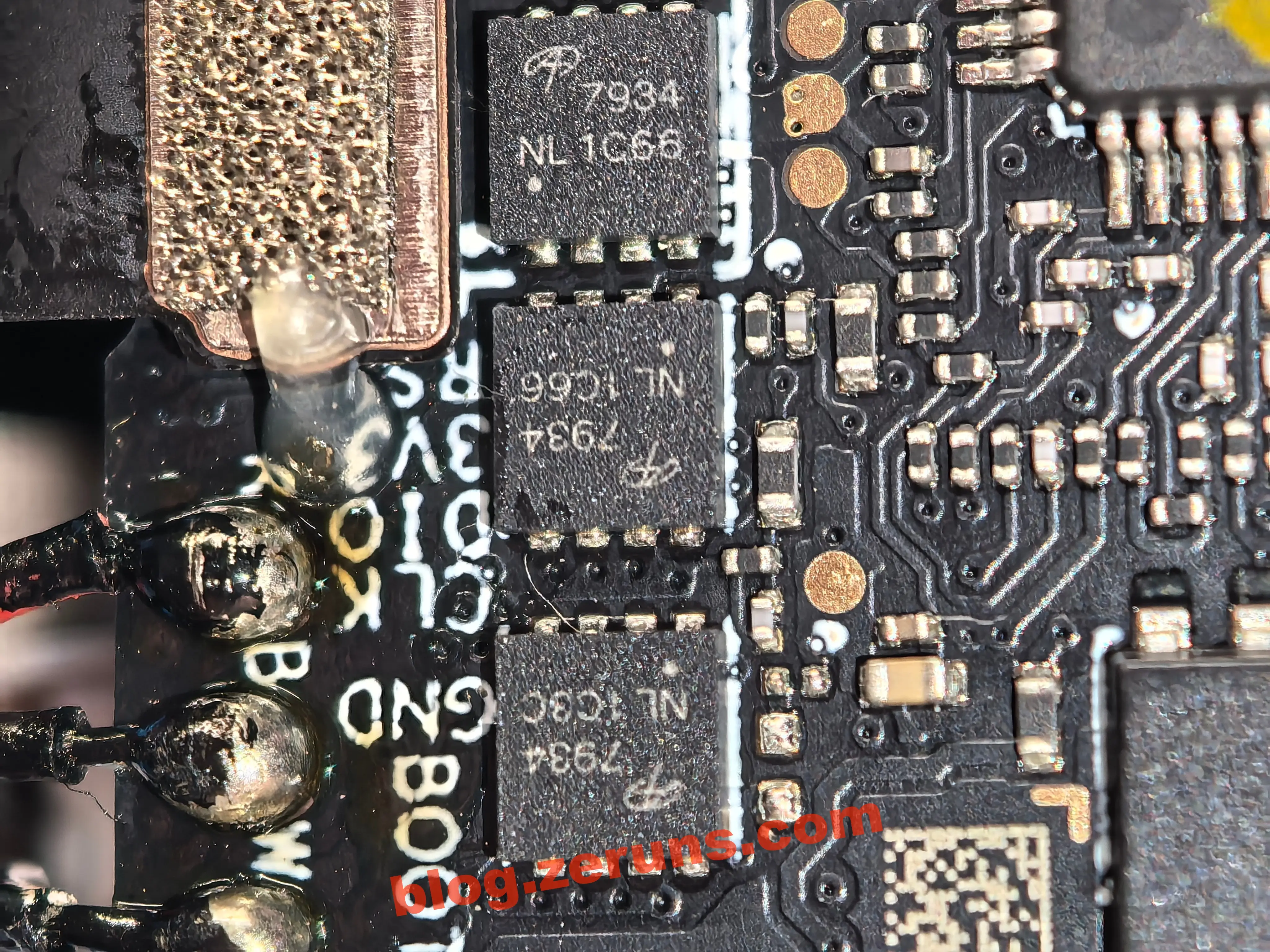
Có 4 nhóm chip MOSFET (3 chip mỗi nhóm) xung quanh bảng điều khiển động cơ, tương ứng với động cơ của bốn cánh quạt. Mô hình MOSFET là AON7934, một MOSFET kênh N kép của Alpha và Omega Semiconductor Limited (AOS), hai NMOS trong một chip tạo thành một cầu phân nửa.
Thông số cốt lõi:
- Hiệu năng điện:
- Điện áp máng-nguồn (Vds): 30V
- Dòng điện máng liên tục (Id): 16A/18A (các kênh khác nhau)
- Điện trở thông mạch (Rds (on)): Tối thiểu 10,2mΩ @ 16A, 10V
- Điện dung đầu vào (Ciss): 485pF
- Thiết kế vỏ và độ tin cậy: Sử dụng vỏ DFN-8 (3x3), hỗ trợ dải nhiệt độ hoạt động rộng từ -55℃~150℃, đáp ứng yêu cầu độ tin cậy của drone trong môi trường ngoài trời phức tạp.
Chip phía trên giao diện pin có mô hình AON6407, một MOSFET kênh P của AOS.
Thông số và đặc điểm chính:
- Hiệu năng điện: Điện áp máng-nguồn (Vds) -30V, Dòng điện máng liên tục (Id) -85A, Điện trở thông mạch (Rds (on)) 4,5mΩ
- Thiết kế vỏ: Sử dụng vỏ PDFN-8 (5,8x4,9)
Phân tích chức năng:
Với tư cách là ống chuyển mạch nguồn của mạch pin, chip AON6407 đảm nhận các chức năng chính sau phía trên giao diện pin:
- Điều khiển Bật/Tắt nguồn: Chịu trách nhiệm chuyển mạch truyền điện giữa pin và mạch chính của drone, thực hiện điều khiển chính xác nguồn điện khi khởi động và ngắt khi tắt máy.
- Truyền tải điện hiệu quả: Với điện trở thông mạch thấp (4,5mΩ), giảm tổn thất điện trong quá trình cung cấp điện từ pin, nâng cao hiệu quả sử dụng năng lượng và gián tiếp kéo dài thời lượng sử dụng pin của drone.
- Bảo vệ an toàn mạch: Trong các điều kiện hoạt động bất thường như quá dòng hoặc quá áp, chip có thể nhanh chóng ngắt mạch để ngăn ngừa hư hại pin hoặc hệ thống phía sau do quá tải, đảm bảo độ tin cậy của hệ thống cấp nguồn.
Nói ngắn gọn, đây là một “cửa ngõ nguồn” giữa pin và mạch cốt lõi của drone, không chỉ đảm bảo truyền tải điện hiệu quả mà còn tạo thành hàng rào an toàn cho hệ thống cấp nguồn.

Ở mặt sau bảng điều khiển động cơ, có 4 chip MP6530 của MPS (Monolithic Power Systems), một IC điều khiển cổng dành riêng cho các bảng điều khiển động cơ một chiều không chổi than ba pha. Nó có thể điều khiển 3 cầu phân nửa được tạo thành từ 6 MOSFET kênh N và xử lý điện áp lên đến 60V.
Tháo 2 ốc vít chéo dưới ngăn chứa pin để loại bỏ nắp dưới của drone.
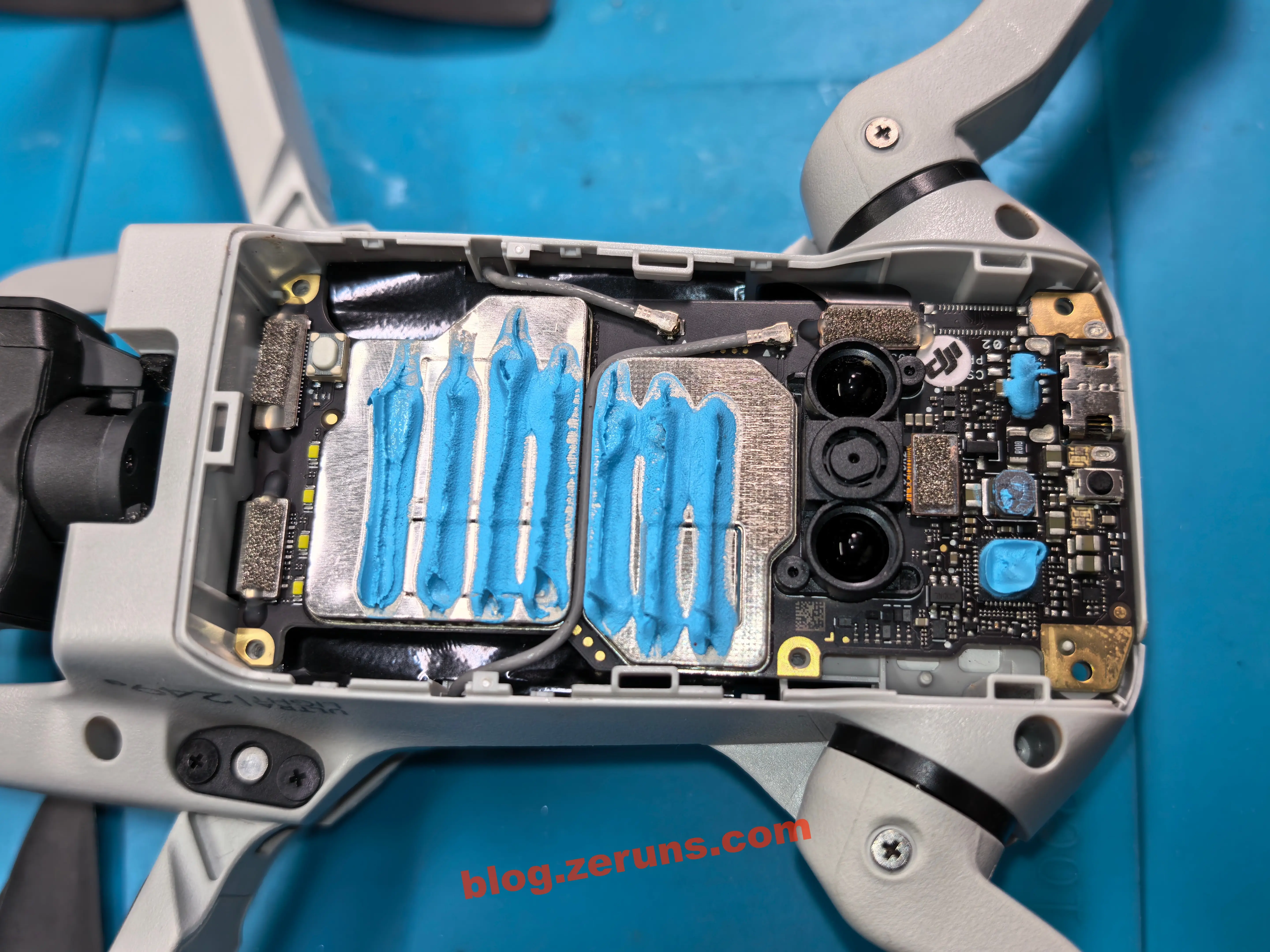
Đầu tiên bạn sẽ thấy một miếng tản nhiệt hợp kim nhôm đen lớn, bên dưới là camera hướng xuống và mô-đun đo khoảng cách hồng ngoại.

Sau khi tháo tản nhiệt, lớp chắn và một số chip được phủ keo tản nhiệt màu xanh.
Tháo bảng mạch chính đã đề cập ở trên; mặt sau bảng mạch chứa cổng sạc Type-C và khe cắm thẻ TF.

Tháo lớp chắn dưới khe cắm thẻ TF (mặt còn lại của bảng mạch tại vị trí này là mô-đun camera hướng xuống), bên trong có chip OPT3101 của Texas Instruments (TI).
Thuộc tính và chức năng cốt lõi:
- Loại công nghệ: Mạch tiền khuếch đại cảm biến khoảng cách và gần gũi (AFE) dựa trên nguyên lý Time of Flight (ToF).
- Nổi bật hiệu năng:
- Phạm vi đo khoảng cách: Không mơ hồ trong phạm vi 15 mét, hỗ trợ đầu ra khoảng cách 16-bit với độ phân giải 3 mm;
- Khả năng thích ứng môi trường: Khả năng chống ánh sáng môi trường xuất sắc, có thể hoạt động dưới ánh nắng đầy đủ 130klx;
- Tích hợp: ADC tích hợp, bộ định thời, động cơ xử lý số và trình điều khiển chiếu sáng, hỗ trợ 3 kênh phát.
Vai trò trong thiết bị:
Với tư cách là thành phần cảm biến ToF cốt lõi, nó chủ yếu được sử dụng để thực hiện:
- Đo khoảng cách chính xác: Cung cấp đo khoảng cách thời gian thực cho drone và các thiết bị khác để hỗ trợ quyết định điều khiển bay và tránh chướng ngại vật;
- Nhận thức môi trường: Xác định khoảng cách và hướng của chướng ngại vật xung quanh thông qua cảm biến đa vùng, nâng cao khả năng tương tác thông minh và an toàn của thiết bị;
- Hoạt động chống nhiễu: Không bị ảnh hưởng bởi độ phản xạ của vật thể, có thể xuất dữ liệu độ sâu ổn định trong môi trường ánh sáng phức tạp.

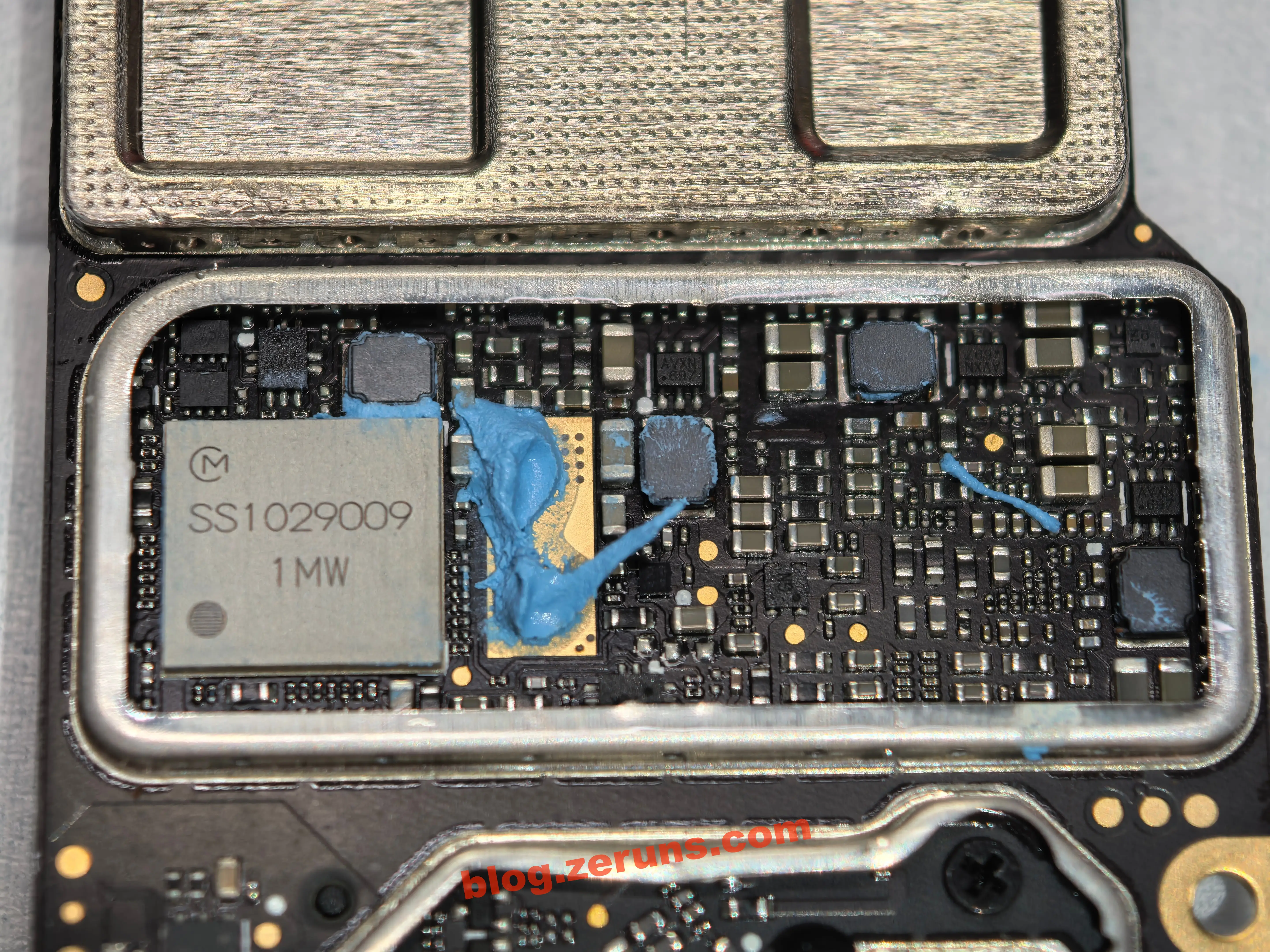
Bên trong lớp chắn giữa có chip mô hình SS1029009 của muRata, được cho là chịu trách nhiệm điều chế và giải điều chế tín hiệu truyền hình ảnh của drone.
Bên trong lớp chắn lớn nhất có ba chip lớn: MIMXRT1064, TC58NVG1S3H, và NT5CB128M16JR-FL.
1. i.MX RT1064 (MIMXRT1064)
- Thương hiệu và định vị: Bộ xử lý hiệu suất cao thuộc dòng i.MX RT của NXP.
- Thông số chính:
- Lõi: Cortex-M7, tần số tối đa 600MHz.
- Lưu trữ: Hỗ trợ mở rộng DDR và Flash ngoài, có khả năng xử lý dữ liệu tốc độ cao.
- Vai trò chức năng: Là vi điều khiển chính của DJI Mini 2, đảm nhiệm các nhiệm vụ cốt lõi như điều khiển chuyến bay, kết hợp dữ liệu cảm biến và tiền xử lý hình ảnh, đóng vai trò như “bộ não” của máy bay không người lái.
2. TC58NVG1S3H (Chip Flash Toshiba)
- Thương hiệu và định vị: Chip Flash NAND SLC của Toshiba.
- Thông số chính:
- Dung lượng: 2Gbit (256MByte), thiết bị lưu trữ công nghiệp.
- Đặc điểm: Hỗ trợ đọc/ghi tốc độ cao, có chức năng bảo vệ dữ liệu khi mất điện.
- Vai trò chức năng: Dùng để lưu trữ dữ liệu quan trọng như chương trình firmware, nhật ký chuyến bay và tham số hiệu chuẩn của máy bay không người lái, đảm bảo sự ổn định khi khởi động hệ thống và cấu hình chức năng.
3. NT5CB128M16JR-FL (Bộ nhớ DDR Nanya)
- Thương hiệu và định vị: Chip nhớ DDR3 của Nanya.
- Thông số chính:
- Dung lượng: 128M×16bit (2Gbit=256MByte), điện áp hoạt động 1.5V.
- Tốc độ dữ liệu: Tối đa 2133 MT/s (tương đương DDR3-2133), tương ứng tần số đồng hồ 1066 MHz.
- Hiệu năng: Hỗ trợ thông lượng dữ liệu tốc độ cao để đáp ứng yêu cầu băng thông rộng của vi điều khiển chính.
- Vai trò chức năng: Là bộ nhớ chạy, cung cấp không gian đệm dữ liệu cho i.MX RT1064, đảm bảo vận hành mượt mà các nhiệm vụ như thuật toán điều khiển chuyến bay và xử lý hình ảnh thời gian thực.

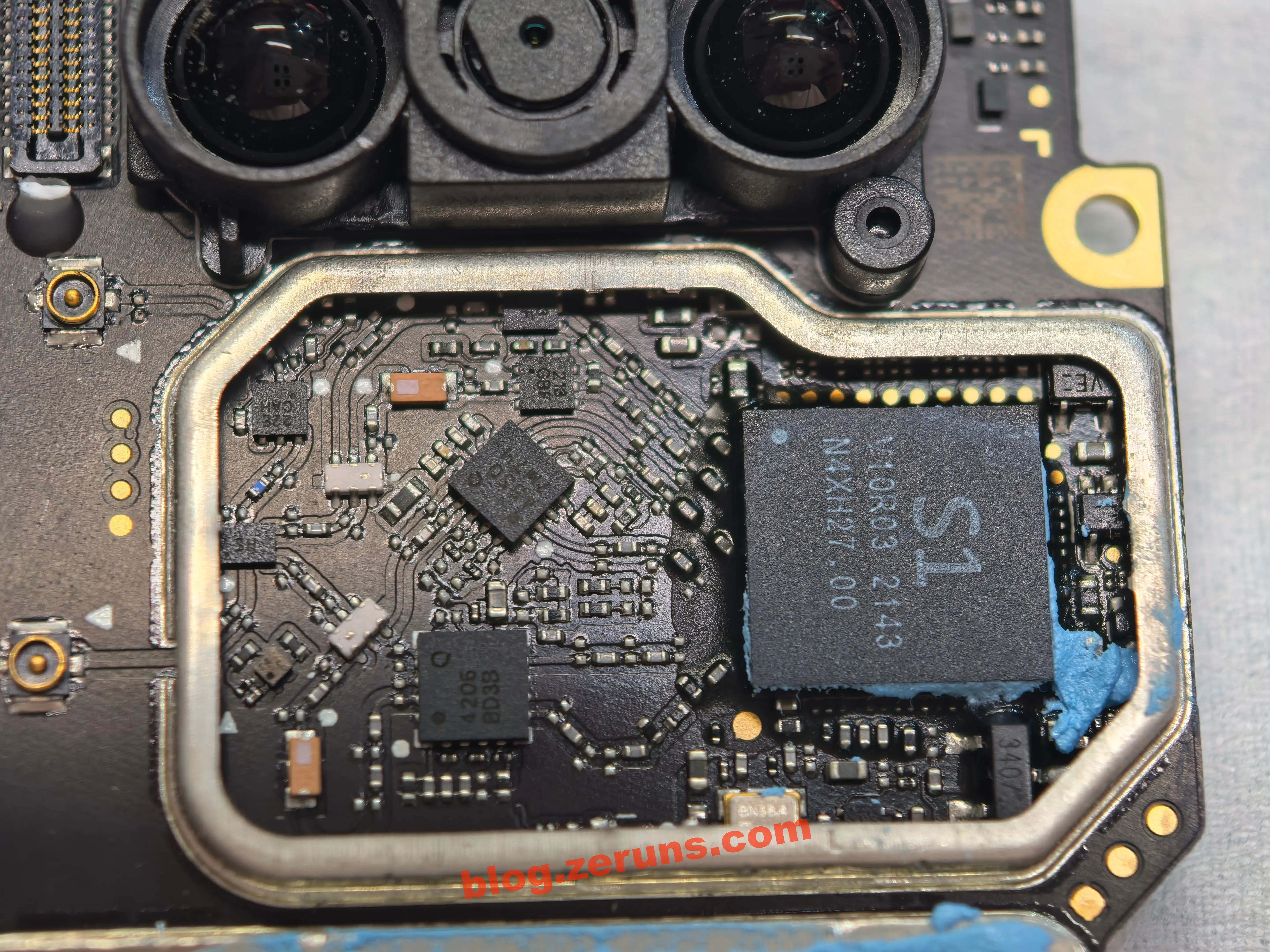
Bên trong lớp vỏ bọc dưới mô-đun camera hướng xuống, có ba chip chính: S1 V10R03, 4205, và 4550.
1. Chip S1 V10R03
- Loại: Chip truyền hình ảnh chuyên dụng (thuộc dòng S1 của hệ thống OcuSync của DJI, biệt danh “Sparrow 1”).
- Chức năng: Là lõi của hệ thống truyền hình ảnh máy bay không người lái, đảm nhiệm điều chế, giải điều chế, truyền dữ liệu và mã hóa tín hiệu không dây, là thành phần quan trọng để đạt được truyền hình ảnh độ trễ thấp và ổn định cao. Chip này chỉ xử lý phần liên lạc RF, còn các nhiệm vụ như mã hóa video được thực hiện bởi chip khác phối hợp. Do đó, ở các mẫu cấp thấp như dòng Mini, nó giống như một “modem”.
- Đặc điểm thông số: Hỗ trợ băng thông tối đa 20MHz, sử dụng kiến trúc chuyên dụng, được tối ưu hóa riêng cho liên kết không dây của máy bay DJI, chỉ dùng trong sản phẩm hệ sinh thái DJI, tạo thành một trong những “rào cản kỹ thuật” của hãng.
2. Chip 4205
- Loại: Bộ khuếch đại công suất RF 2.4GHz (dự đoán là chip cùng dòng với QPF4206, có đánh dấu đơn giản trên silkscreen).
- Chức năng: Khuếch đại tín hiệu không dây băng tần 2.4GHz, cải thiện khoảng cách truyền hình ảnh và khả năng chống nhiễu trong băng tần này. Băng 2.4GHz của DJI Mini 2 dùng cho liên lạc khoảng cách xa (như truyền trong môi trường mở), chip này rất quan trọng để đảm bảo hiệu năng băng tần này.
- Đặc điểm thông số: Hoạt động trong băng tần 2.4GHz, có khả năng khuếch đại công suất hiệu quả, tăng cường độ mạnh tín hiệu phát lên mức tối đa theo quy định, đồng thời giảm tiêu thụ điện để phù hợp với yêu cầu tuổi thọ pin của máy bay.
3. Chip 4550
- Loại: Bộ khuếch đại công suất RF 5.8GHz (mã QPF4550).
- Chức năng: Khuếch đại tín hiệu không dây băng tần 5.8GHz. Băng tần này có băng thông rộng hơn, phù hợp truyền video độ nét cao nhưng khả năng xuyên thấu kém. Chip này đảm nhận việc tăng cường công suất phát 5.8GHz, đảm bảo ổn định truyền hình ảnh độ nét cao của Mini 2 trong môi trường khoảng cách ngắn và ít nhiễu (như truyền độ trễ thấp khi quay ở đô thị).
- Đặc điểm thông số: Được tối ưu hóa riêng cho băng tần 5.8GHz, hiệu suất công suất cao, duy trì chất lượng tín hiệu trong truyền băng thông rộng, là một trong những phần cứng cốt lõi để đạt được chức năng “truyền hình ảnh độ trễ thấp” của Mini 2.
Ba chip này phối hợp xây dựng hệ thống liên lạc không dây của DJI Mini 2: S1 đảm nhận phần “quản lý mã hóa và truyền tín hiệu”, 4205 và 4550 lần lượt tăng cường độ mạnh tín hiệu 2.4GHz và 5.8GHz, cuối cùng mang lại trải nghiệm truyền hình ảnh khoảng cách xa và độ trễ thấp.
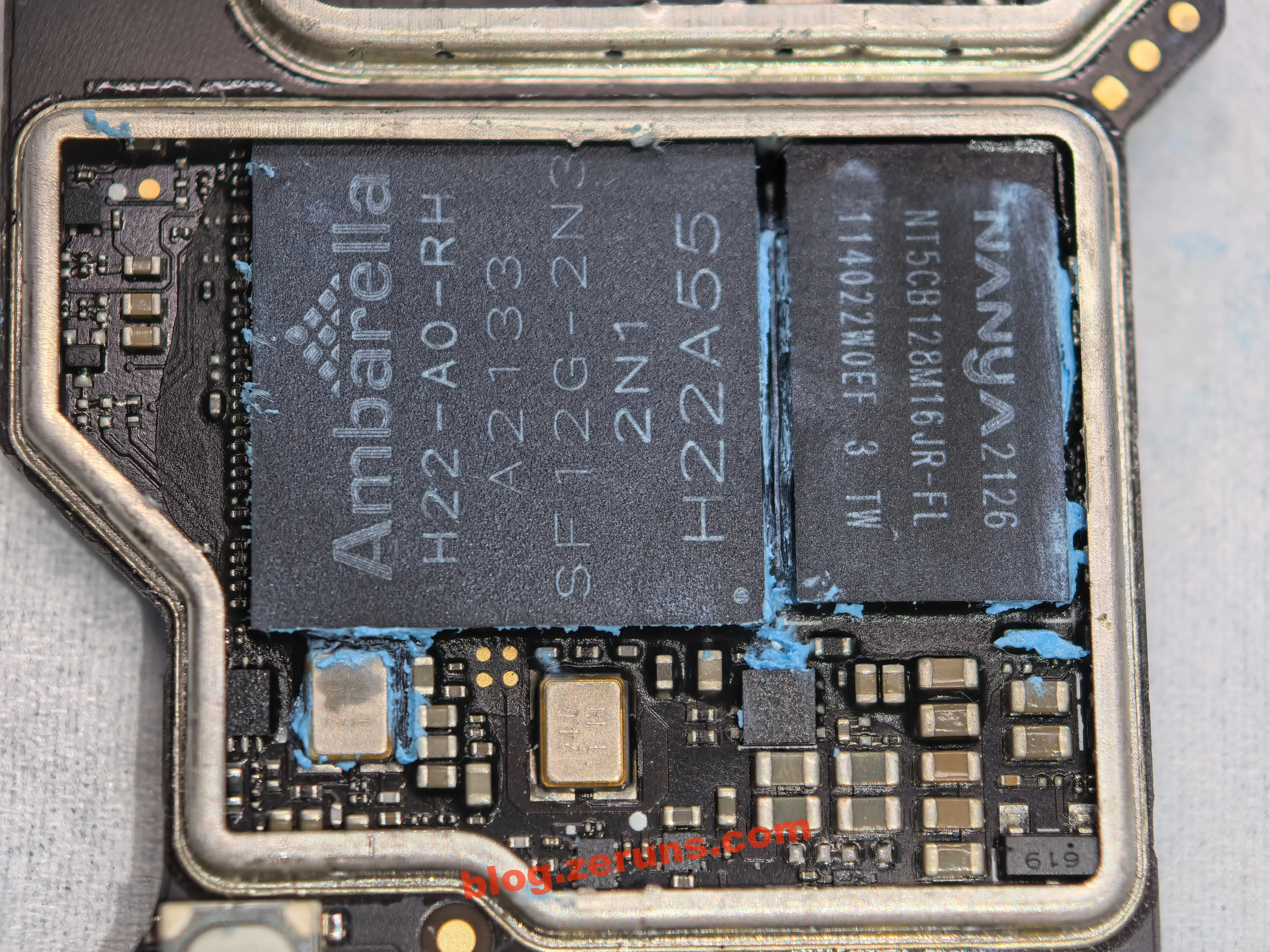
Bên trong lớp vỏ bọc cạnh giao diện camera trên không, có hai chip chính: H22-AO-RH và NT5CB128M16JR-FL.
1. Ambarella H22-A0-RH (Chip xử lý video)
- Thương hiệu và định vị: Ambarella là nhà sản xuất chip xử lý video hàng đầu thế giới, dòng H22 là giải pháp xử lý hình ảnh hiệu suất cao dành cho máy bay không người lái tiêu dùng.
- Kiến trúc lõi và quy trình:
- CPU: ARM Cortex-A53 lõi tứ, tần số tối đa 1 GHz, hỗ trợ đa nhiệm và tính toán cơ bản.
- Công nghệ quy trình: Quy trình 14nm, cân bằng hiệu năng và tiêu thụ điện, phù hợp hoạt động lâu dài trên thiết bị di động.
- GPU: Không có GPU độc lập, nhưng tích hợp DSP video hiệu suất cao hỗ trợ mã hóa/giải mã video 4K.
- Khả năng xử lý video:
- Định dạng mã hóa: Hỗ trợ H.265 (HEVC) và H.264 (AVC), có thể xuất đồng thời hai luồng video (ví dụ: luồng chính 4K60fps + luồng xem trước độ phân giải di động).
- Độ phân giải và tốc độ khung hình:
- Luồng video chính: 4K@60fps (HEVC/AVC).
- Luồng phụ: Hỗ trợ phát trực tiếp di động thời gian thực (ví dụ: 1080p) qua WiFi.
- Công nghệ tăng cường hình ảnh:
- Chống rung điện tử 3D (EIS): Hỗ trợ 4K@30fps, đạt hình ảnh ổn định nhờ phần cứng chuyên dụng.
- HDR đa lần phơi sáng: Hỗ trợ 4K@30fps, mở rộng phạm vi động.
- Hiệu chỉnh méo hình và hiệu chỉnh màn trập: Tối ưu hóa chất lượng hình ảnh.
2. Nanya NT5CB128M16JR-FL (Chip nhớ DDR)
- Thương hiệu và định vị: Nanya Technology là nhà sản xuất nhớ nổi tiếng, model này thuộc dòng DDR3.
- Thông số chính:
- Dung lượng: 128M×16bit (tức 2Gbit = 256MByte), điện áp hoạt động 1.5V.
- Hiệu năng: Cung cấp khả năng thông lượng dữ liệu tốc độ cao đáp ứng yêu cầu băng thông rộng của chip Ambarella H22 để lưu đệm hình ảnh và vận hành thuật toán.
- Vai trò chức năng: Là bộ nhớ chạy, cung cấp không gian lưu trữ tạm thời cho chip xử lý video, đảm bảo mã hóa video 4K và xử lý hình ảnh thời gian thực diễn ra mượt mà.
Hai chip này tạo thành đơn vị xử lý hình ảnh lõi của máy bay: Ambarella H22 đảm nhận phần “xử lý” video độ nét cao và thực thi thuật toán thông minh, còn bộ nhớ Nanya đóng vai trò “kho tạm” cho nó. Cùng nhau, chúng hiện thực hóa chức năng truyền hình ảnh 4K độ nét cao và xử lý hình ảnh thông minh trên drone DJI.
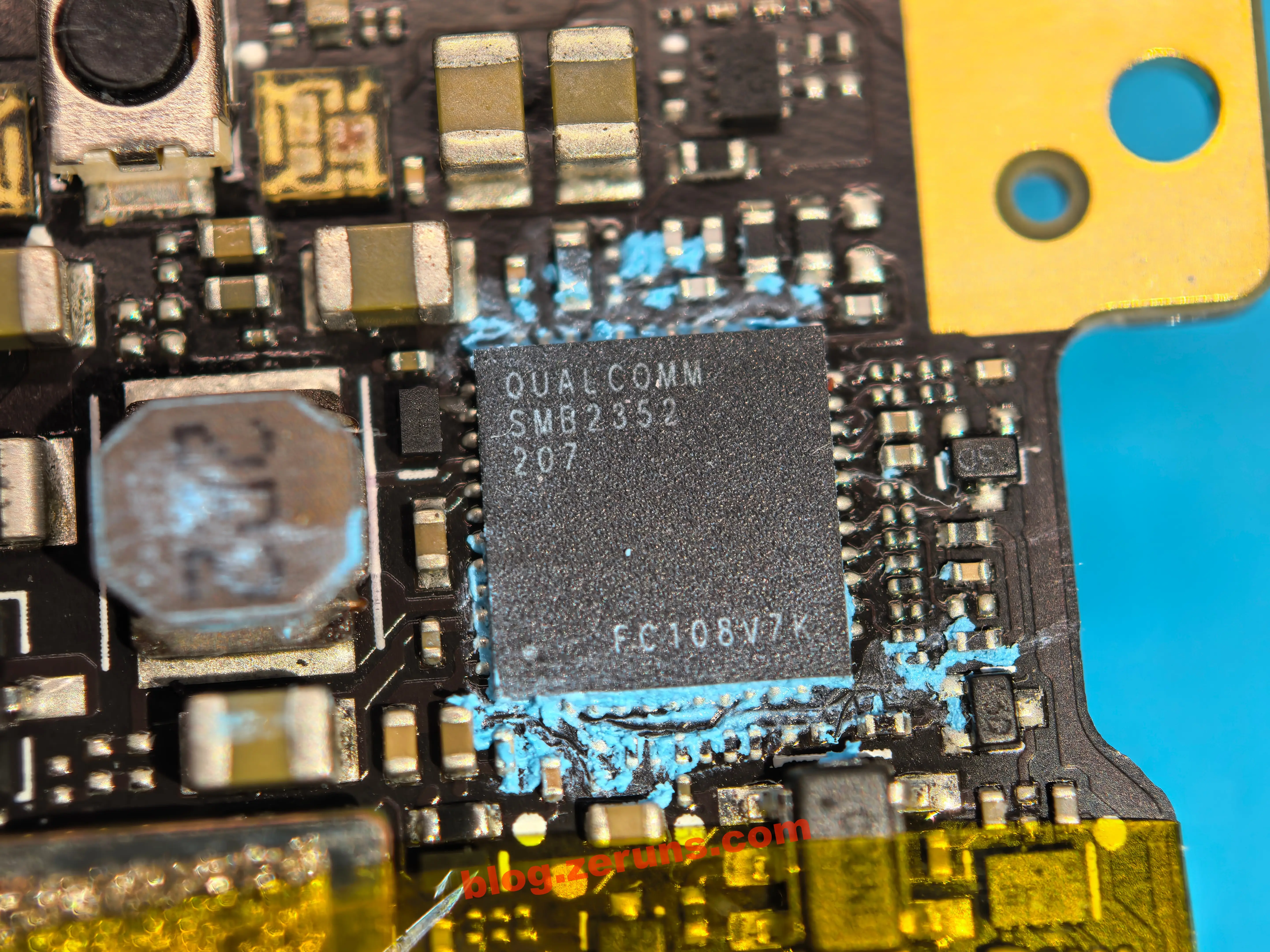
Có một chip tương đối lớn ở bên phải giao diện Type-C, mã hiệu SMB2352.
SMB2352 là IC quản lý sạc Buck-Boost hiệu suất cao do Qualcomm ra mắt, chủ yếu được sử dụng trong các ứng dụng pin kép như sạc dự phòng, drone và máy tính xách tay. Dưới đây là các thông số kỹ thuật chính:
- Dải điện áp đầu vào: 3,3V~16,5V (hỗ trợ đầu vào USB Type-C)
- Dải điện áp đầu ra: Hỗ trợ điều chỉnh Buck-Boost, có thể cung cấp nguồn 3,3V~20V cho hệ thống
- Dòng sạc tối đa: Lên đến 6A tại đầu pin (điều chỉnh lập trình được)
- Dòng đầu vào tối đa: 5A (giới hạn dòng lập trình được)
- Công suất đầu vào: Lên đến 45W
- Hiệu suất: Giá trị điển hình vượt quá 90%
- Vỏ gói: MQFN-57, kích thước 5,5mm × 5,5mm × 0,6mm
- Giao tiếp và điều khiển: Hỗ trợ giao diện I²C, cấu hình lập trình các tham số sạc, ngưỡng bảo vệ, v.v.
- Chức năng bảo vệ: Tích hợp bảo vệ quá điện áp đầu vào (OVP), bảo vệ quá dòng đầu vào (OCP), bảo vệ quá nhiệt pin (OTP)
- Hỗ trợ giao thức:
- USB BC 1.2
- Qualcomm Quick Charge 2.0/3.0/4.0
- USB Power Delivery (PD) 3.0 (tích hợp PD PHY)
- Đặc tả Type-C 1.3
Chip này phù hợp với các giải pháp sạc mật độ công suất cao và hiệu suất cao cho thiết bị di động, có thể điều chỉnh linh hoạt chế độ hoạt động thông qua bộ điều khiển bên ngoài.
Bài đọc đề xuất
- Dịch vụ VPS/Máy chủ đám mây giá rẻ và hiệu quả được đề xuất: https://blog.zeruns.com/archives/383.html
- Hướng dẫn thiết lập máy chủ Minecraft: https://blog.zeruns.com/tag/mc/
- [Mã nguồn mở] Bộ nguồn chuyển mạch Flyback 24V3A: https://blog.zeruns.com/archives/910.html
- Đánh giá chi tiết laptop MECHREVO Code10AI (Ultra7-255H): https://blog.zeruns.com/archives/895.html
- Hướng dẫn xây dựng website thương mại điện tử quốc tế, thiết kế website WordPress cho外贸: https://blog.zeruns.com/archives/889.html
- Hướng dẫn xây dựng website PHP với ứng dụng đám mây RCA (dựa trên K8s): https://blog.zeruns.com/archives/869.html