Đánh giá mở hộp và tháo dỡ đơn giản GL-RM1PE và robot ngón tay FGB-01, giúp máy tính thông thường đạt được chức năng quản lý từ xa BMC.
Video đánh giá: https://www.bilibili.com/video/BV1kBnNzsEBq/
Giới thiệu về GL-RM1PE
GL-RM1 là thiết bị KVM từ xa (IP-KVM) đa năng do GL.iNet (Quảng Liên Trí Thông) ra mắt. Thông qua thiết bị này, bạn có thể điều khiển từ xa máy tính tại nhà khi ở ngoài, truy cập tài nguyên cục bộ hoặc truyền tải tập tin. Thiết bị còn hỗ trợ điều khiển các thiết bị ngoại tuyến từ xa, xử lý sự cố khởi động máy tính và điều chỉnh cài đặt BIOS; chức năng hỗ trợ âm thanh mang lại trải nghiệm tương tác từ xa sống động hơn. Là công cụ đa mục đích phù hợp với làm việc từ xa và quản lý thiết bị trong nhiều tình huống, GL-RM1 giúp nâng cao đáng kể hiệu quả thao tác từ xa.
GL-RM1PE là phiên bản PoE của GL-RM1, được thiết kế nhằm đơn giản hóa việc lắp đặt bằng một cáp duy nhất. GL-RM1PE cung cấp cả nguồn điện và kết nối mạng qua một sợi cáp Ethernet duy nhất, giảm thiểu sự lộn xộn của dây nối và đơn giản hóa quá trình lắp đặt. Ngoài ra, phiên bản này đã nâng cấp dung lượng EMMC lên 32GB, tăng khả năng xử lý nhật ký hệ thống, ghi hình hoặc cài đặt firmware tùy chỉnh.
- Hướng dẫn sử dụng GL-RM1PE: https://docs.gl-inet.cn/kvm/user_guide/gl-rm1pe/
- Mua GL-RM1PE tại: https://s.click.taobao.com/yyVXdXq
Giới thiệu về robot ngón tay FGB-01
FGB-01 là phụ kiện tùy chọn do GL.iNet cung cấp cho thiết bị KVM, mang lại sự tiện lợi bổ sung cho việc quản lý từ xa.
Robot ngón tay đóng vai trò như bộ mô phỏng nút bấm vật lý, được thiết kế để điều khiển từ xa nút nguồn vật lý trên thiết bị được kiểm soát. Là bộ mô phỏng nút bấm vật lý, robot ngón tay chuyên dùng để bật/tắt PC từ xa. Thiết bị có đặc điểm dễ dàng dán lắp, thời lượng pin kéo dài tới một năm, phù hợp sử dụng hàng ngày và không yêu cầu thiết lập phức tạp.
Bạn cũng có thể chọn mua thêm bo mạch GL-ATX, bo mạch này có thể lắp bên trong case máy tính và trực tiếp điều khiển việc bật/tắt máy thông qua dây nối nút nguồn (F_PANEL).
Các tình huống sử dụng
- Quản lý tập trung phòng máy chủ: Cáp mạng đơn với nguồn PoE giúp đơn giản hóa việc đi dây, giám sát từ xa hình ảnh và trạng thái hoạt động của máy chủ, thực hiện bật/tắt máy, can thiệp sự cố.
- Bảo trì từ xa doanh nghiệp: Điều khiển từ xa ở cấp độ phần cứng, không cần thiết bị được kiểm soát phải kết nối mạng hay khởi động hệ thống, nhanh chóng giải quyết các vấn đề như màn hình xanh, không thể khởi động, giảm chi phí kiểm tra tại chỗ.
- Cài đặt và bảo trì hệ thống từ xa: Treo ảnh ISO mô phỏng ổ đĩa quang/USB, hoàn tất việc cài đặt hệ thống, cài đặt lại hoặc nâng cấp firmware từ xa, phù hợp nhu cầu triển khai số lượng lớn.
- Kiểm soát thiết bị không người trực: Hỗ trợ PoE phù hợp với môi trường ngoài trời/công nghiệp, kết hợp với phụ kiện để điều khiển nguồn thiết bị từ xa, xem trạng thái hoạt động thời gian thực, đạt được quản lý ít bảo trì.
Thông số kỹ thuật
| Tính năng | GL-RM1PE | GL-RM1 | Khác |
|---|---|---|---|
| Độ trễ | Khoảng 30-60ms | Khoảng 30-60ms | >100ms |
| Tốc độ Ethernet | 1Gbps | 1Gbps | 100Mbps |
| Phương thức cấp nguồn | PoE/DC | DC | DC |
| Độ phân giải | 3840x2160@30FPS | 3840x2160@30FPS | 1920x1200@60FPS |
| Truy cập cấp độ BIOS | Hỗ trợ | Hỗ trợ | Hỗ trợ |
| Hỗ trợ ứng dụng macOS/Windows |
Hỗ trợ | Hỗ trợ | Không hỗ trợ |
| Âm thanh từ xa | Hai chiều | Một chiều | Không |
| Truyền tệp tin từ xa | Hỗ trợ | Hỗ trợ | Không hỗ trợ |
| Tốc độ truyền tệp tin | 25MB/s | 10MB/s | Không hỗ trợ |
| Cài đặt hệ thống từ xa | Hỗ trợ | Hỗ trợ | Hỗ trợ |
| Dung lượng lưu trữ | 32GB eMMC | 8GB eMMC | 128MB |
| Vỏ ngoài | Hợp kim nhôm | Kim loại CNC | Nhựa PVC |
Mở hộp
GL-RM1PE
Mặt trước hộp

Mặt bên hộp, in địa chỉ trang web công ty và danh sách đóng gói:
- GL-RM1PE KVM từ xa
- Cáp mạng
- Cáp USB (Type A - Type C)
- Cáp USB (Type C - Type C)
- Cáp HDMI
- Sách hướng dẫn
Mặt đáy hộp, in tên và địa chỉ công ty

Khi mở hộp, đầu tiên là sách hướng dẫn và thiết bị chính, phía dưới là phụ kiện và các dây cáp

Sách hướng dẫn GL-RM1PE
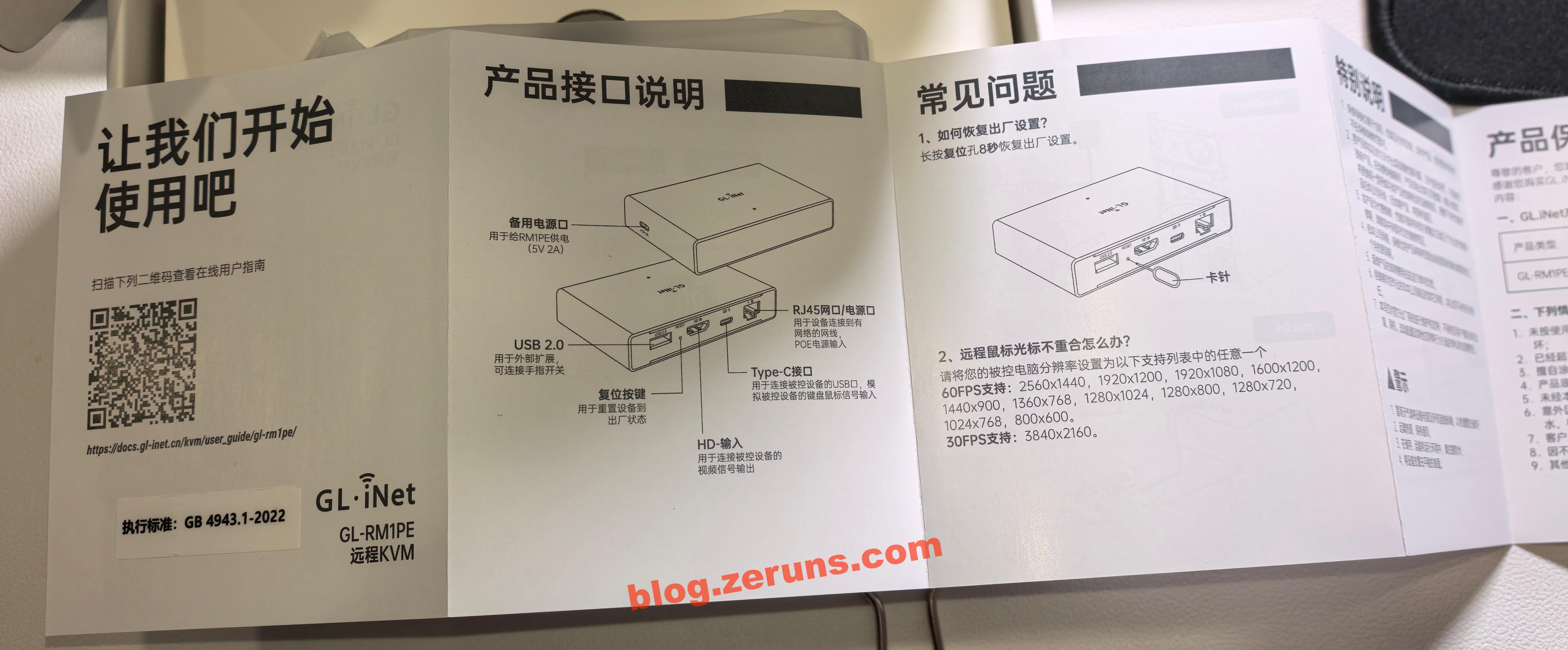
GL-RM1PE và các dây cáp đi kèm. Các cổng ở mặt sau gồm: USB-A (dùng để kết nối với bo mạch GL-ATX hoặc robot ngón tay), HDMI (thu tín hiệu video từ máy chủ được điều khiển), Type-C (kết nối với máy chủ được điều khiển để giả lập bàn phím và chuột), cổng RJ45 (hỗ trợ cấp nguồn PoE). Bên cạnh có một cổng sạc Type-C (nguồn 5V, tương thích PD).

FGB-01 Robot ngón tay – Mở hộp
Mặt trước hộp

Mặt đáy hộp, in tên công ty và danh sách đóng gói:
- Robot ngón tay (FGB-01)
- Gói phụ kiện
- Sách hướng dẫn

Khi mở hộp, đầu tiên là sách hướng dẫn
Tiếp theo là thân robot ngón tay và phụ kiện

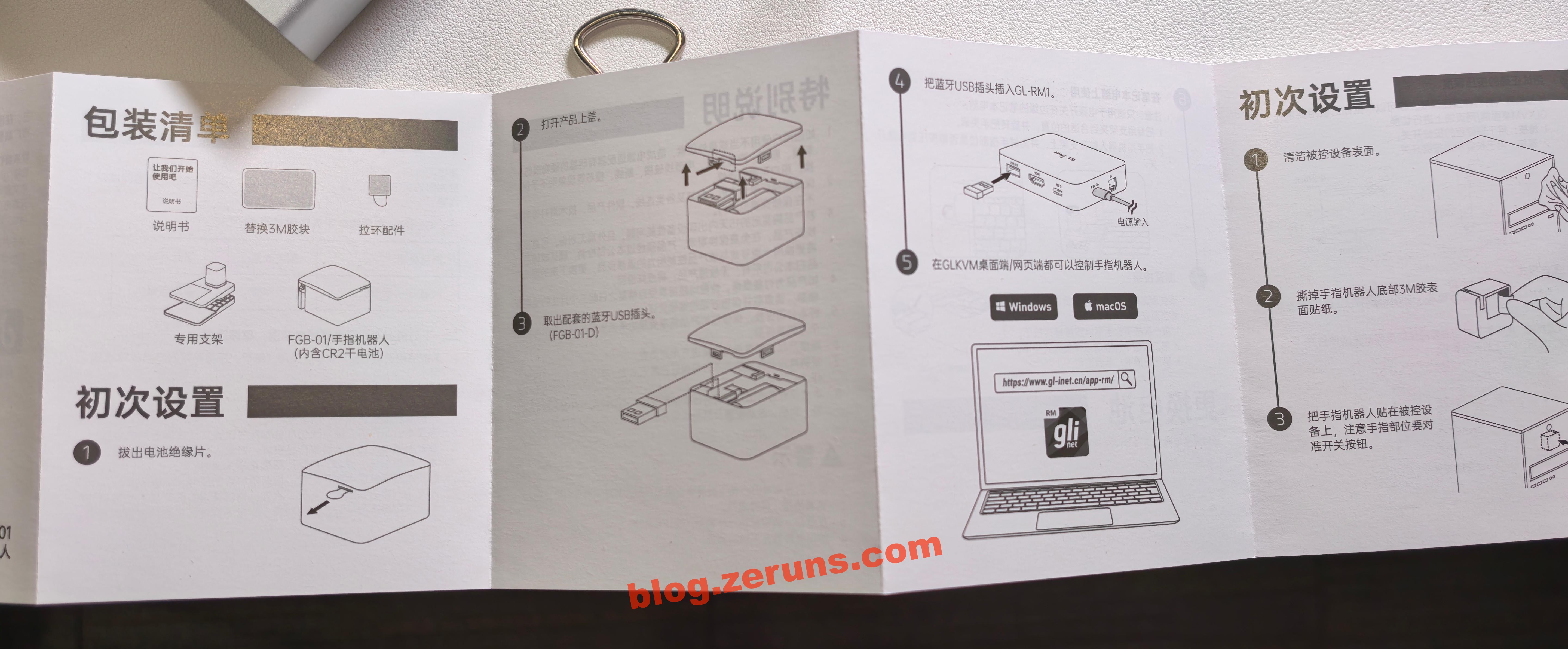
Phụ kiện gồm hai miếng dán 3M hai mặt và một kẹp (có thể dùng để kẹp vào laptop cố định robot ngón tay)

Đánh giá và hướng dẫn sử dụng
GL-RM1PE
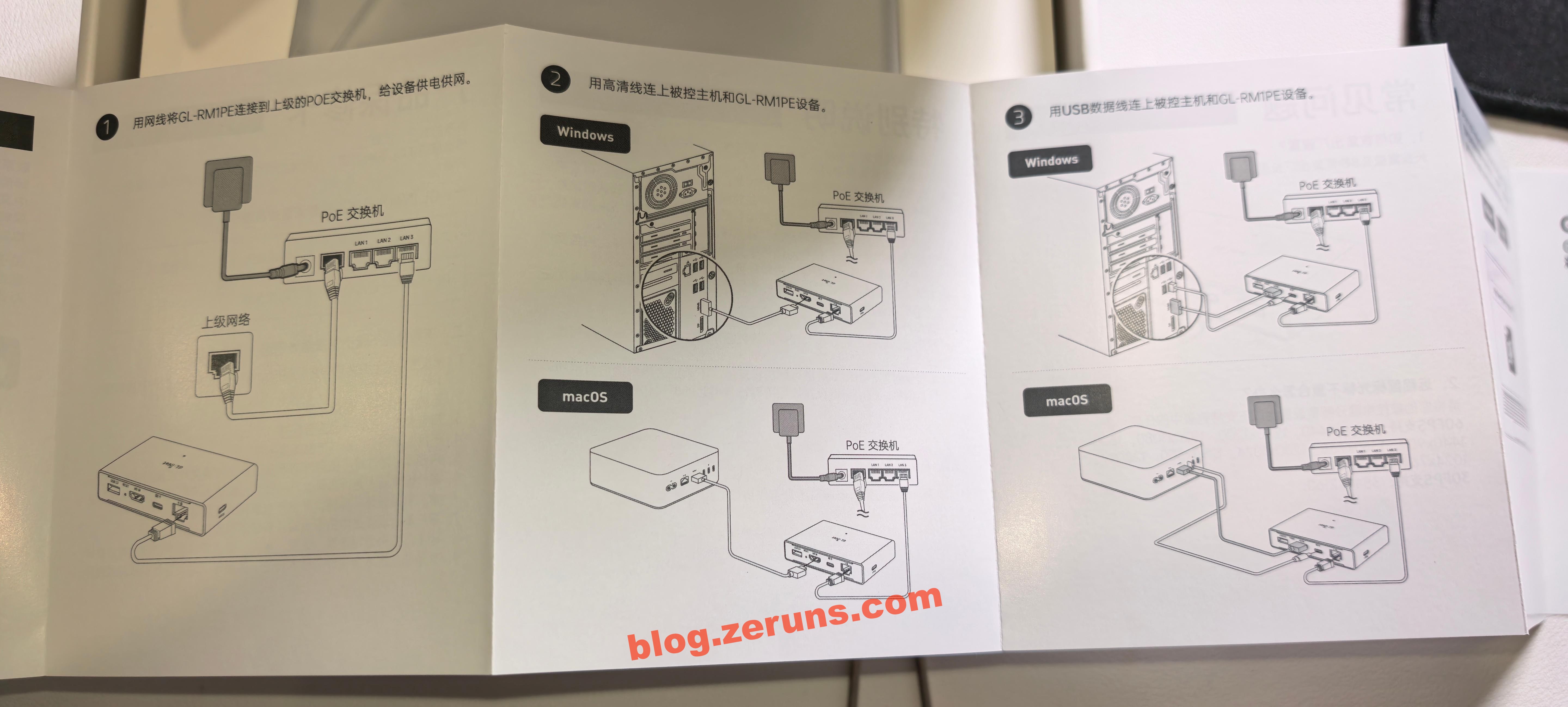
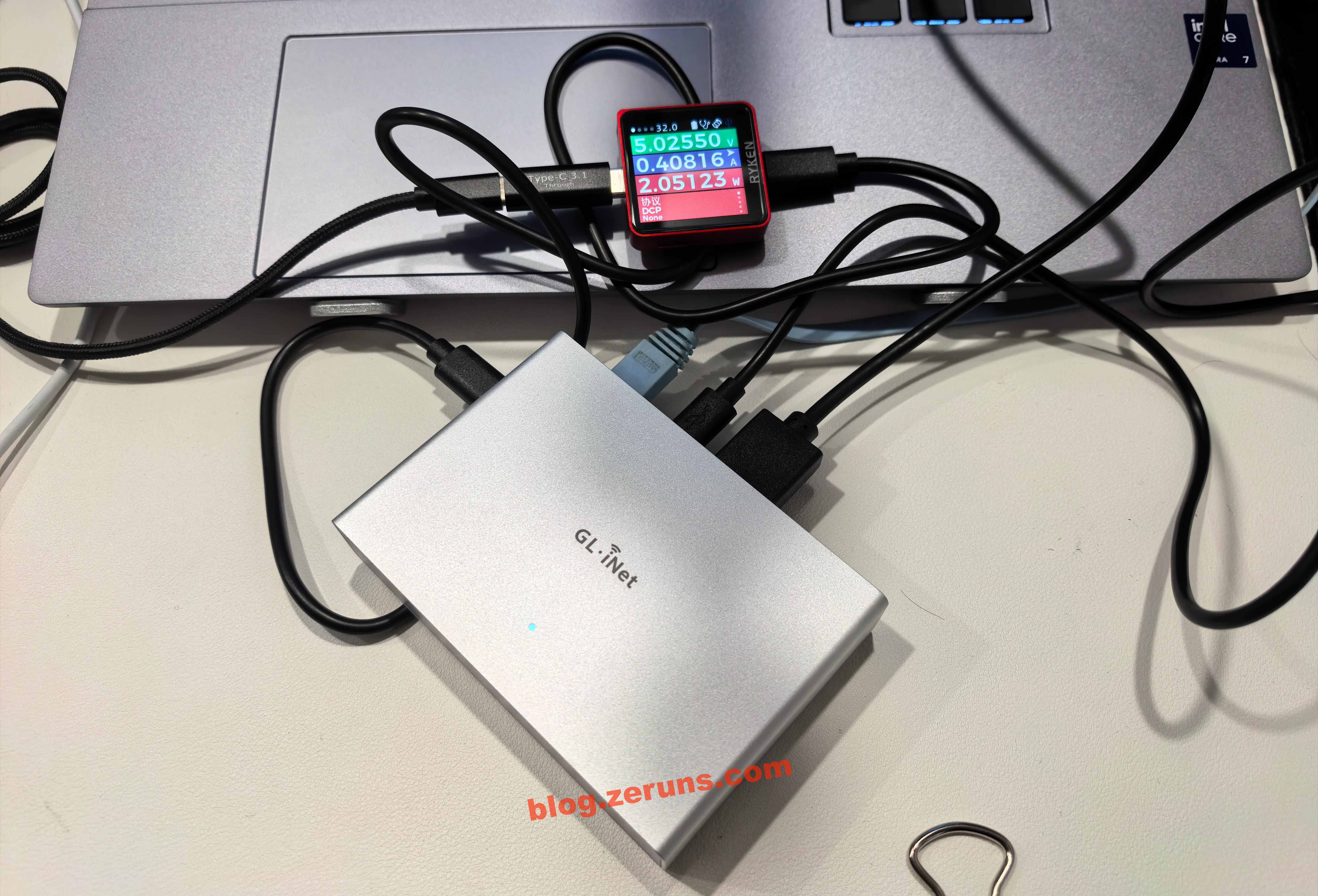
Đầu tiên, cắm cáp HDMI và cáp Type-C (cạnh HDMI) của GL-RM1PE vào máy tính cần điều khiển, đồng thời kết nối cáp mạng và cáp nguồn (cổng Type-C bên cạnh).
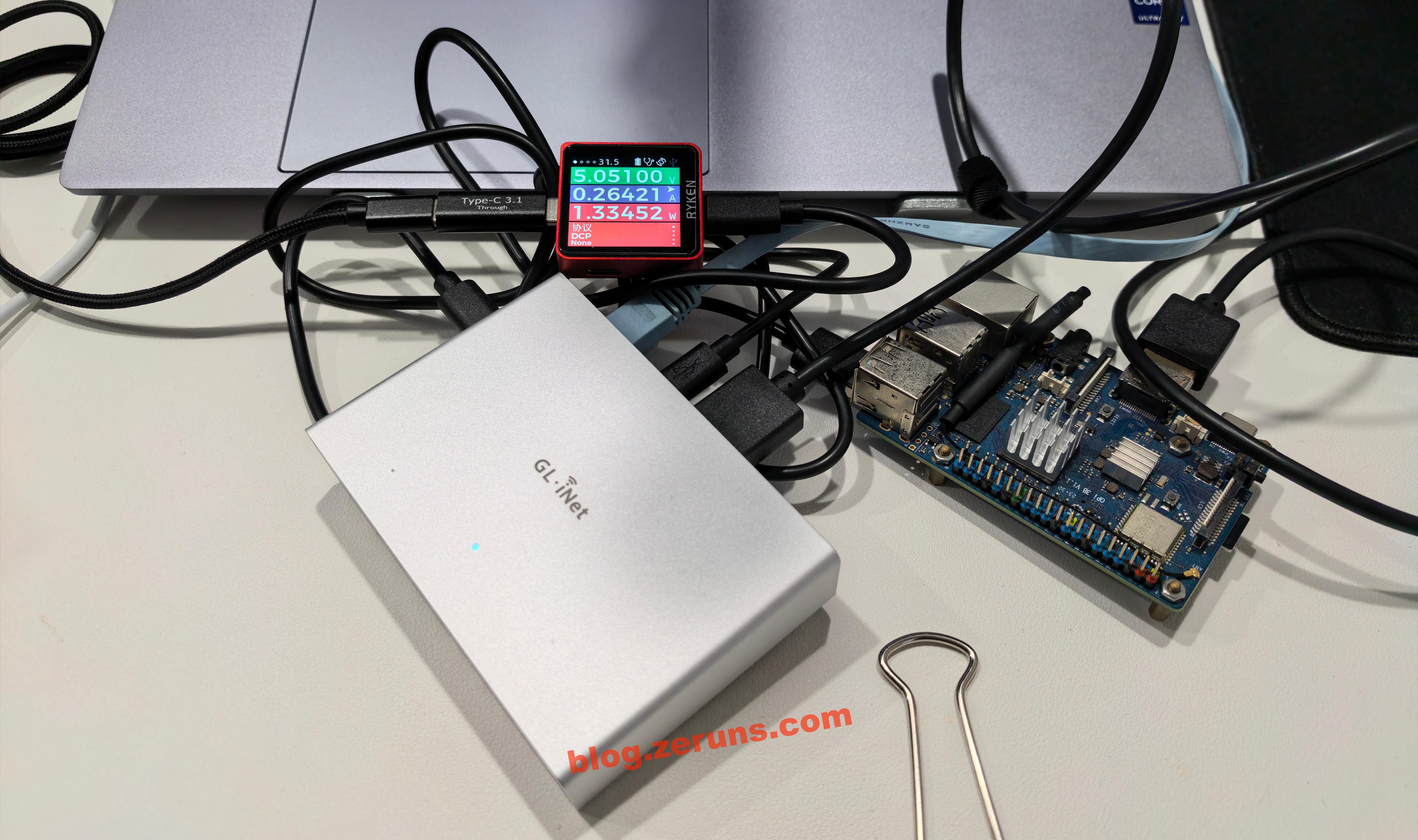
Chờ đèn báo sáng trắng liên tục là quá trình khởi động hoàn tất. Sau khi khởi động xong, mức tiêu thụ điện năng của GL-RM1PE khoảng 2 watt.
Đồng hồ đo dòng USB: https://s.click.taobao.com/bQtCNLq
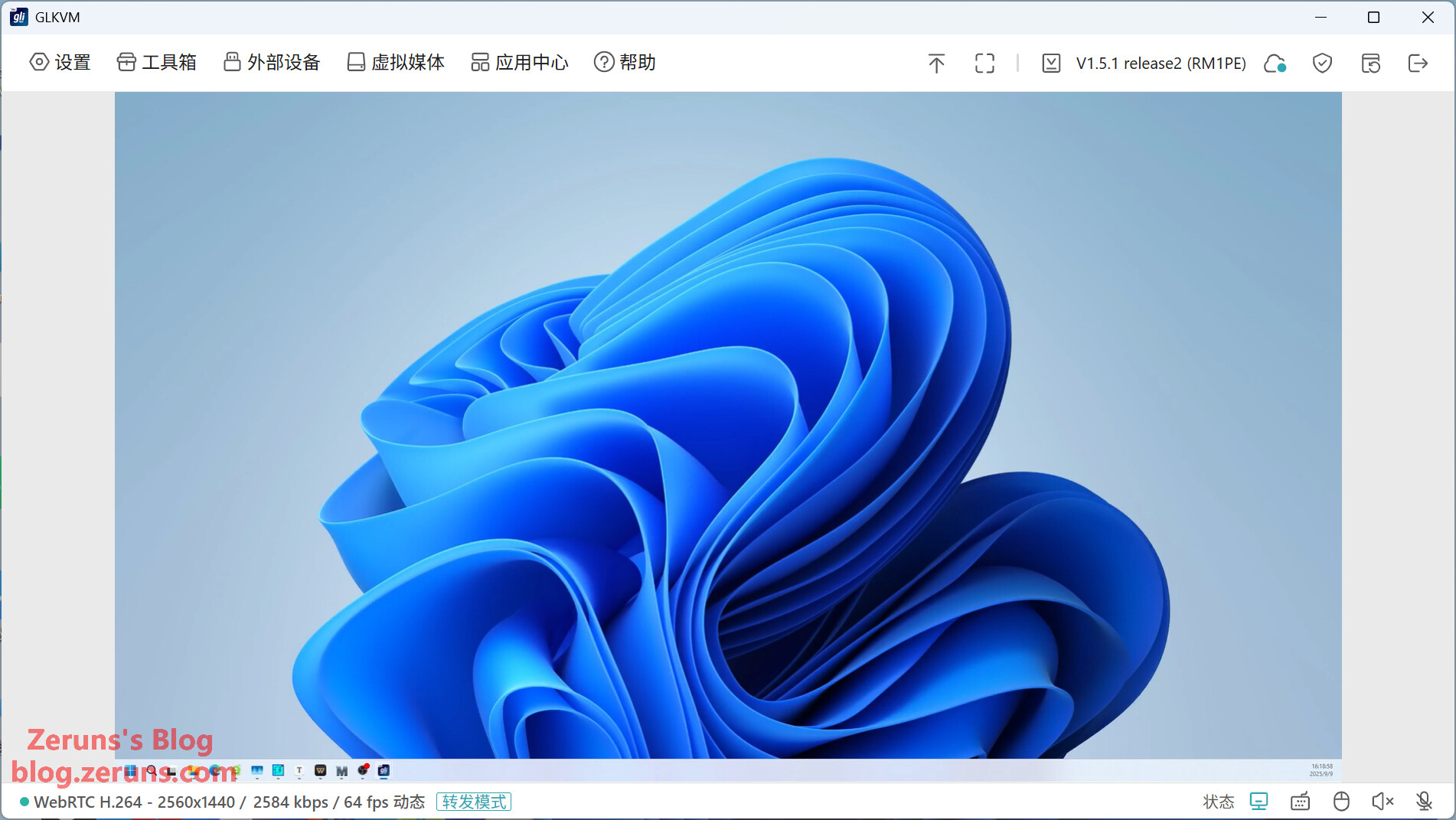
Sau khi khởi động xong, truy cập vào giao diện quản lý router để tìm địa chỉ IP của thiết bị này, sao chép vào thanh địa chỉ trình duyệt để mở trang điều khiển. Lần đầu tiên truy cập cần thiết lập mật khẩu. Ngoài ra, bạn cũng có thể tải ứng dụng khách từ trang web GL.iNet để tìm kiếm thiết bị (phải cùng mạng LAN), sau đó liên kết thiết bị. Nếu không cùng mạng LAN, bạn vẫn có thể nhập số sê-ri SN của thiết bị để liên kết. Sau khi liên kết, bạn có thể sử dụng ứng dụng khách để điều khiển từ xa dù ở mạng khác. Ngoài ra, bạn cũng có thể sử dụng Tailscale (GL-RM1PE tích hợp sẵn client Tailscale) để tạo mạng LAN ảo nhằm điều khiển từ xa.
Hình ảnh khá mượt mà, hiệu quả cụ thể xem trong video đánh giá ở trên.
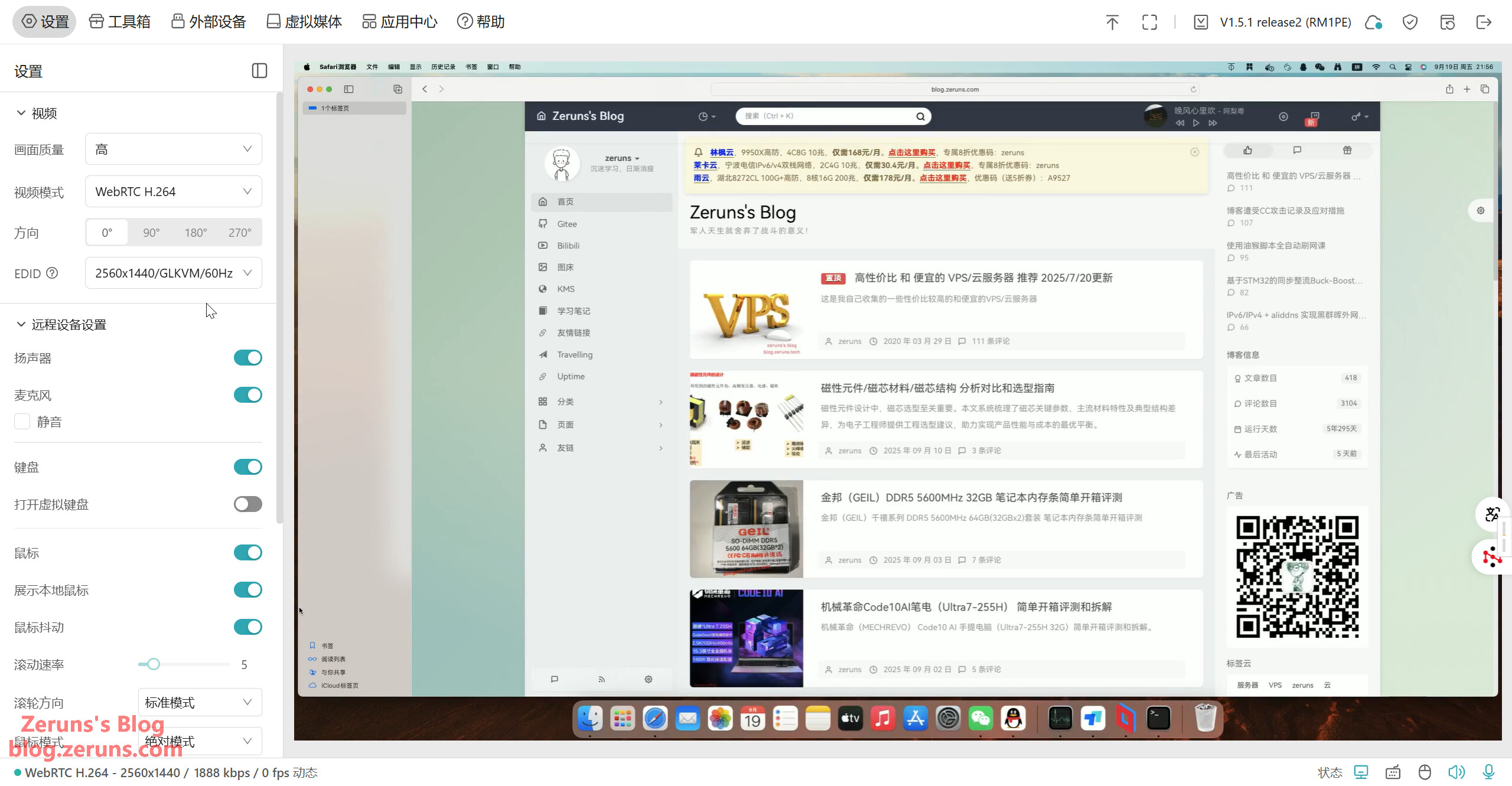
Bạn có thể chỉnh sửa thông tin EDID của cổng HDMI, hỗ trợ tối đa độ phân giải 4K30 khung hình/giây, mã hóa video chỉ hỗ trợ H.264.

Hỗ trợ truyền âm thanh từ micro cục bộ đến thiết bị được điều khiển (thiết bị nhận sử dụng cổng USB mô phỏng micro), đồng thời cũng có thể truyền âm thanh loa từ thiết bị được điều khiển về để phát lại. Ngoài ra còn có chức năng bàn phím ảo.
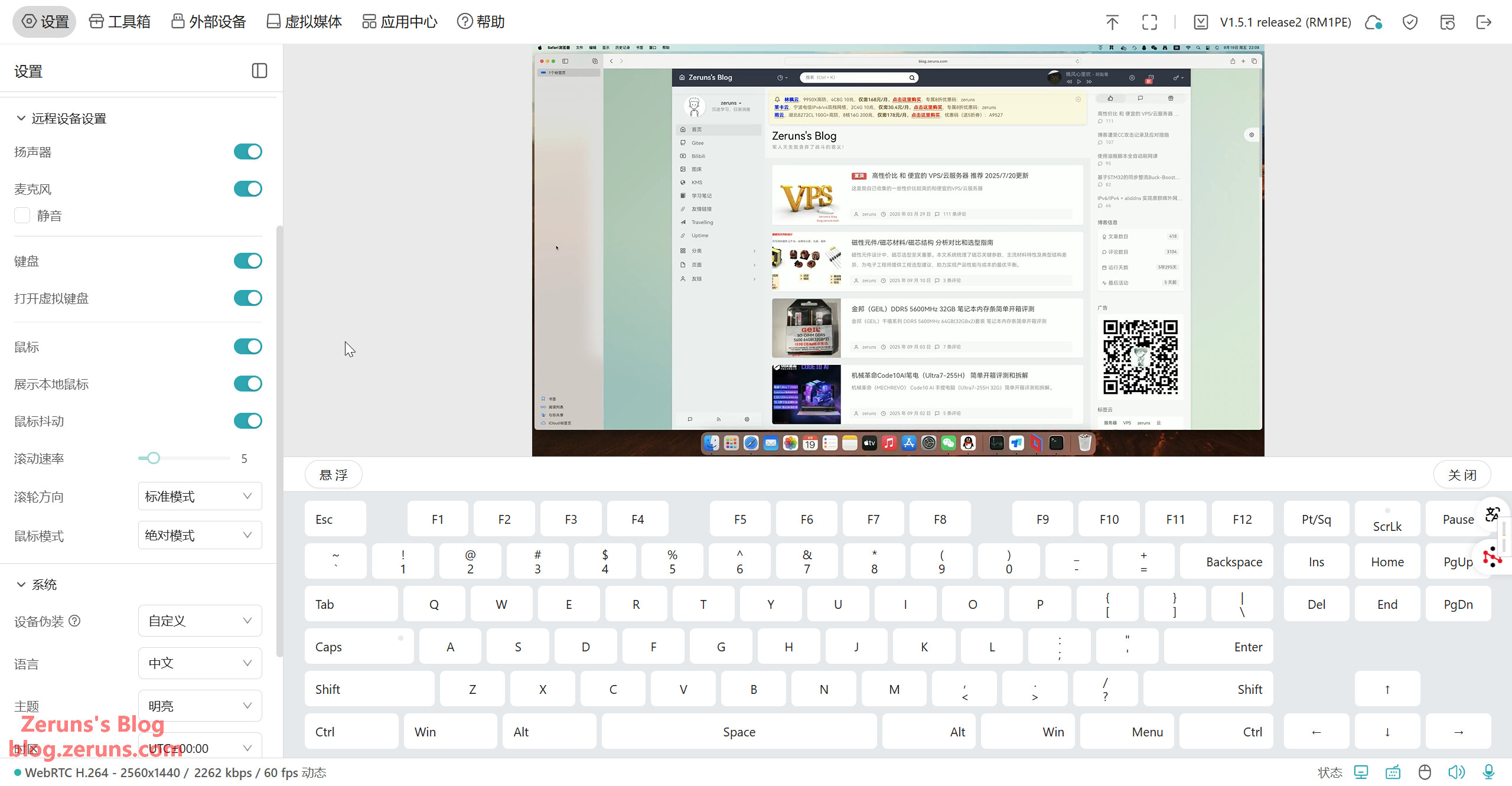
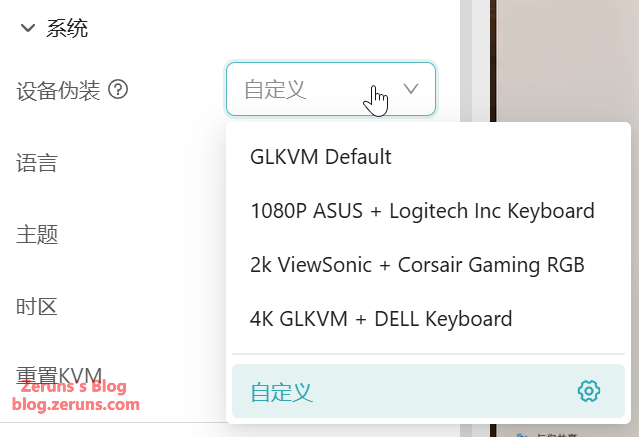
Hỗ trợ ngụy trang thiết bị
Thông qua chức năng bảng tạm trong hộp công cụ, bạn có thể sao chép-dán văn bản sang thiết bị từ xa, đồng thời nhanh chóng sử dụng các phím tắt, cũng như đánh thức thiết bị trong mạng LAN.

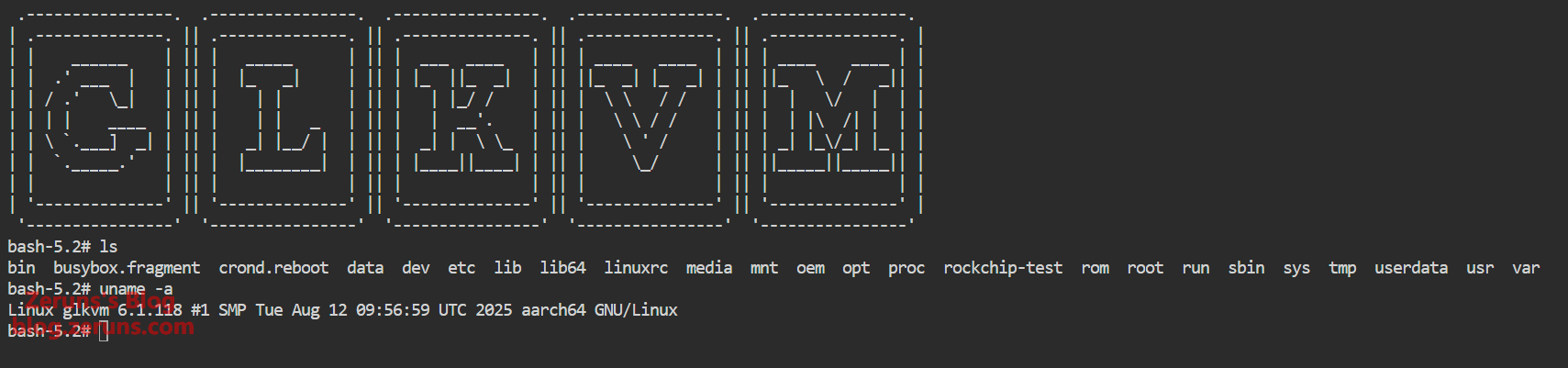
Chức năng Terminal cho phép truy cập vào terminal hệ thống GLKVM, tại đây bạn có thể thấy hệ thống GL-RM1PE sử dụng nhân Linux 6.1.
Sau khi kết nối GL-RM1PE với robot ngón tay hoặc bo mạch GL-ATX, bạn có thể thực hiện thao tác nhấn nút nguồn trên thiết bị được điều khiển tại mục “Thiết bị ngoại vi”, đồng thời có thể thiết lập thời gian nhấn nút nguồn.

Trong phần “Thiết bị ảo”, bạn có thể tải tệp lên rồi giả lập thành USB để truyền tệp vào thiết bị được điều khiển, hoặc giả lập file ảnh thành đĩa CD-ROM chỉ đọc để cài lại hệ điều hành,…

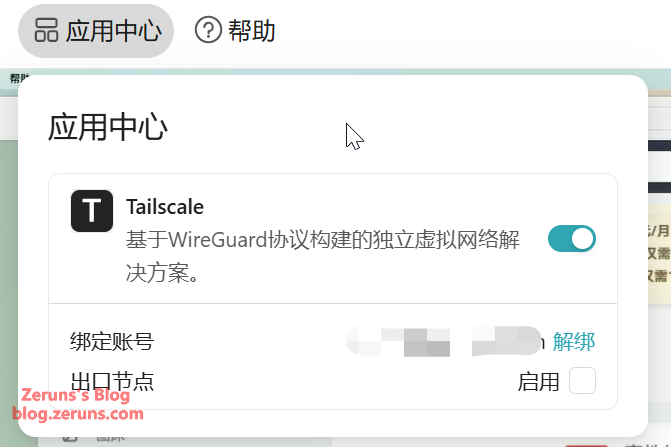
Trong trung tâm ứng dụng có tích hợp Tailscale, giúp xuyên thủng mạng nội bộ, cho phép điều khiển từ xa ngay cả khi ở bên ngoài.
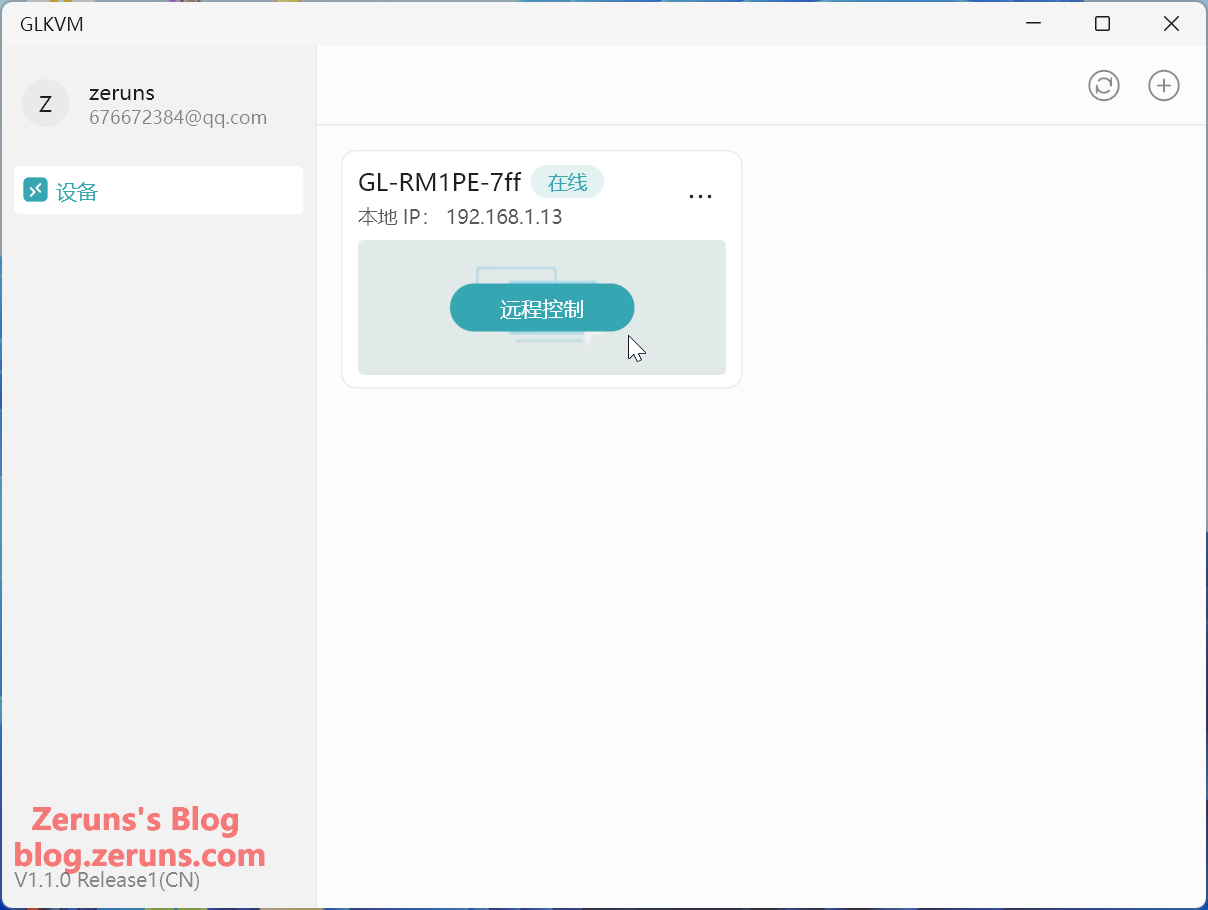
Ảnh chụp màn hình ứng dụng khách, cho phép điều khiển từ xa ngay cả khi ở bên ngoài, không cần IP công cộng.
FGB-01 Robot ngón tay
Tháo miếng cách điện nhựa khỏi pin của robot ngón tay là có thể hoạt động bình thường. Mở nắp trên cùng của robot ngón tay để lấy bộ thu USB Bluetooth, cắm bộ thu này vào cổng USB-A của GL-RM1PE, sau đó bạn có thể điều khiển robot ngón tay nhấn nút thông qua mục “Thiết bị ngoại vi” trên giao diện điều khiển.
Robot ngón tay sử dụng pin CR2, điện áp 3V, bạn có thể tự thay bằng pin CR2 lithium có thể sạc được.

Tiếp theo, dán robot ngón tay vào thiết bị cần điều khiển, đảm bảo tay cơ khí của nó có thể chạm vào nút nguồn vật lý khi nhấn. Điều này cho phép điều khiển nguồn của thiết bị.


Có hai chế độ nhấn nút: nhấn mạnh và nhấn nhẹ, với độ sâu khác nhau để phù hợp với các loại nút khác nhau.
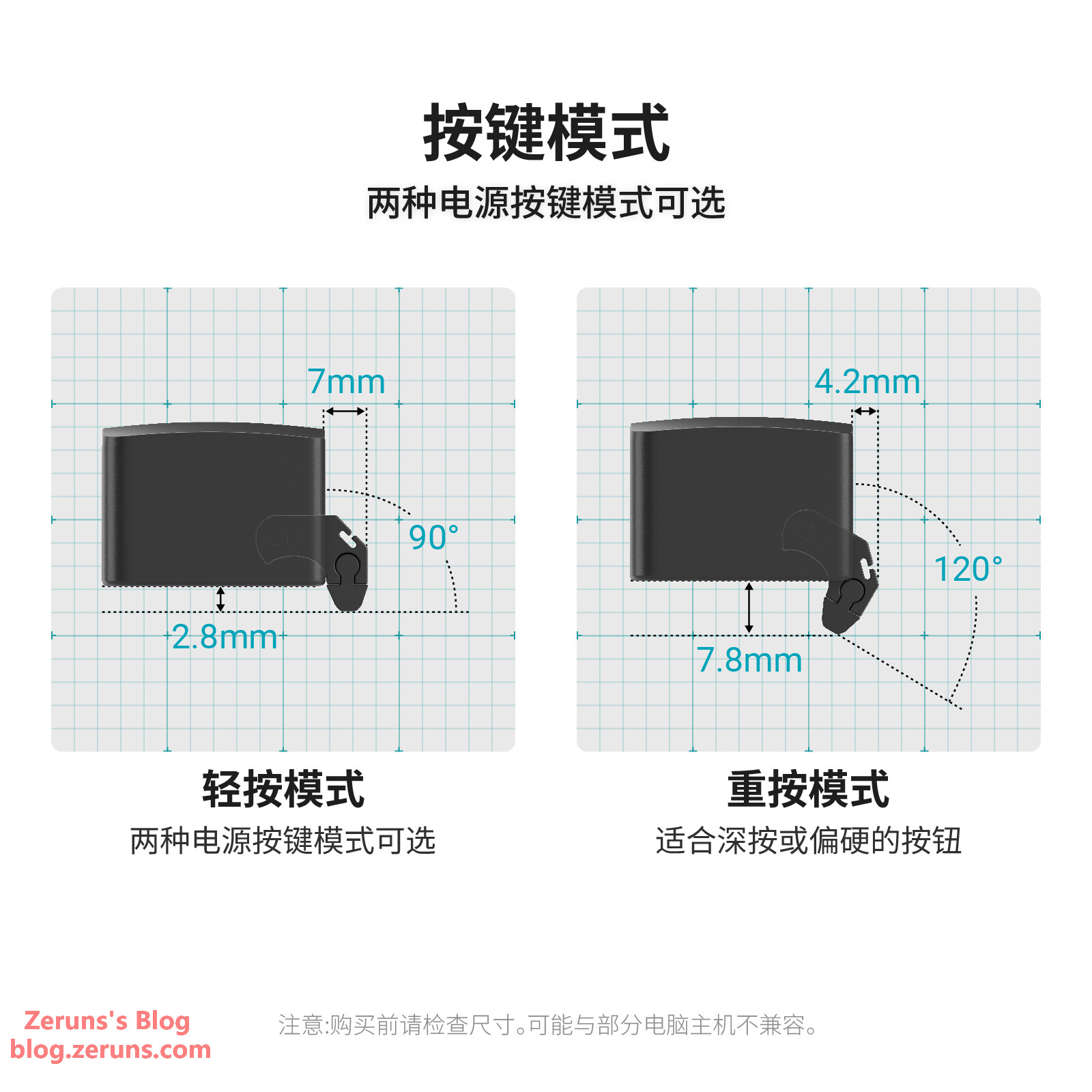
Bạn cũng có thể sử dụng nút kiểm tra (nằm bên trong robot ngón tay, nhìn thấy được sau khi tháo nắp trên) để tìm ra mức độ nhấn phù hợp với bạn.
Tháo dỡ
GL-RM1PE
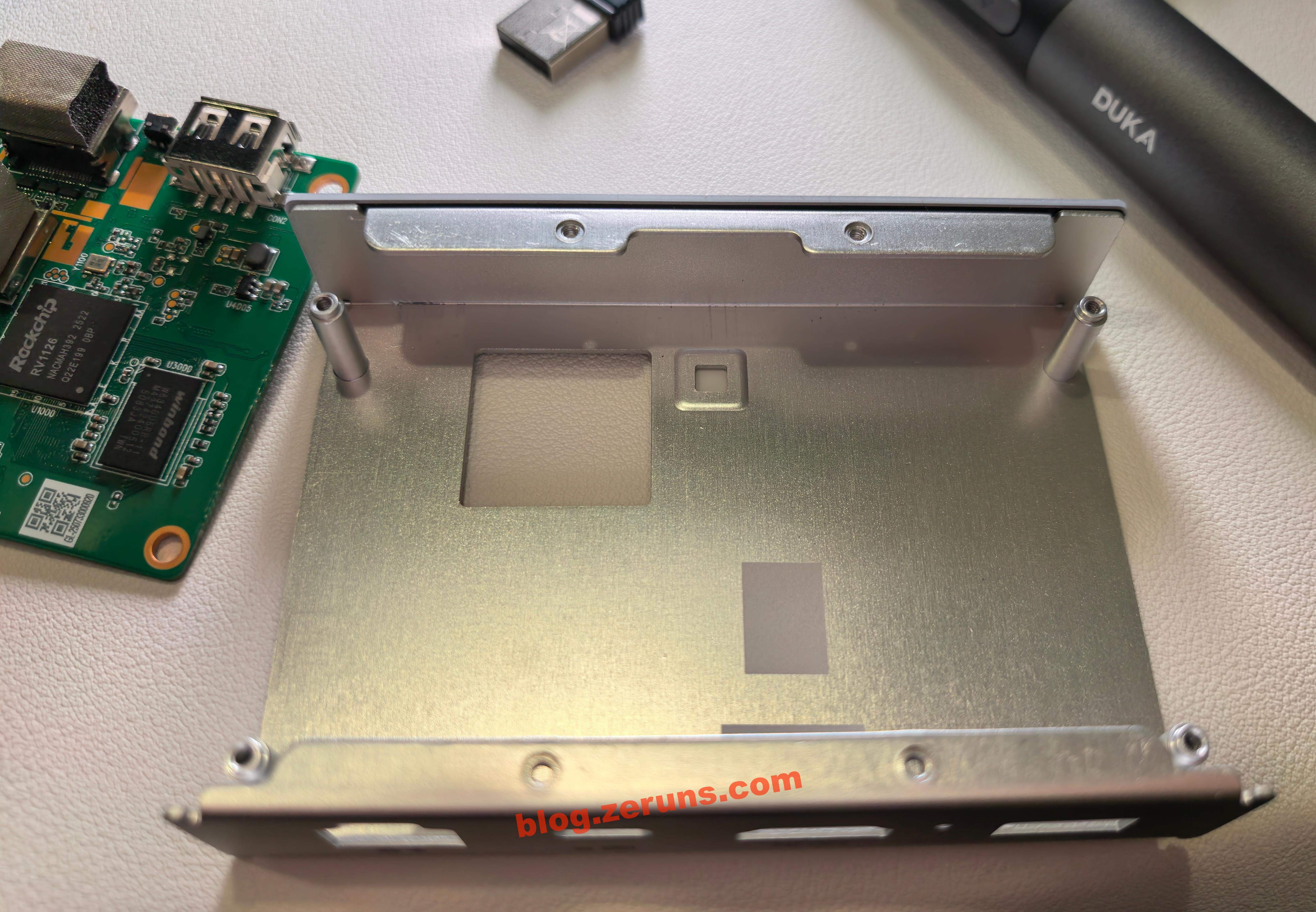
Tháo 4 ốc vít nằm dưới các miếng đệm chống trượt để lấy ra bo mạch chủ và khung nhôm bên trong.

Mặt sau khung nhôm, có một cửa sổ được khoét cho biến áp.

Tháo các ốc vít trên bo mạch chủ, sau đó tháo bảng mạch ra.
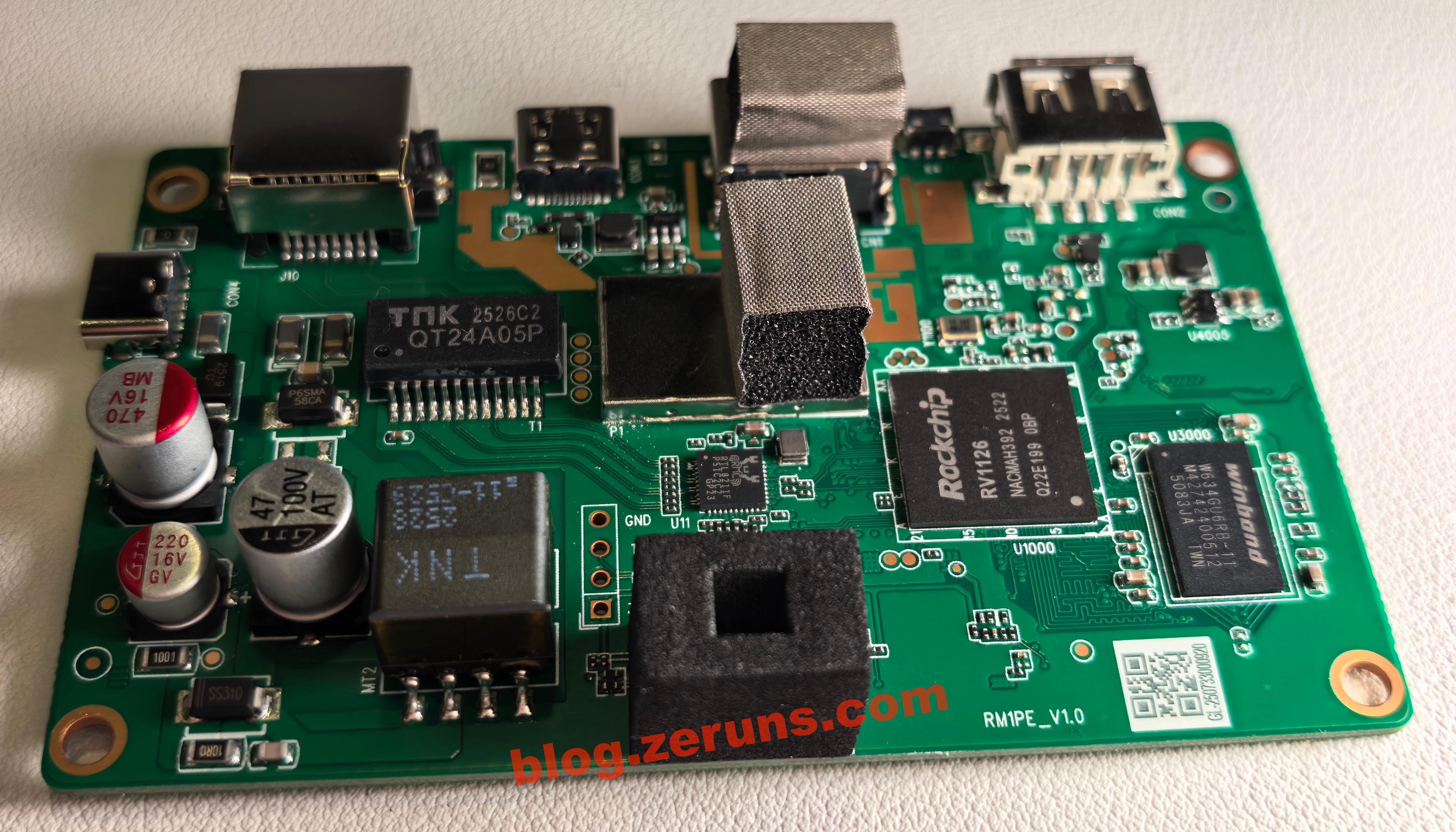
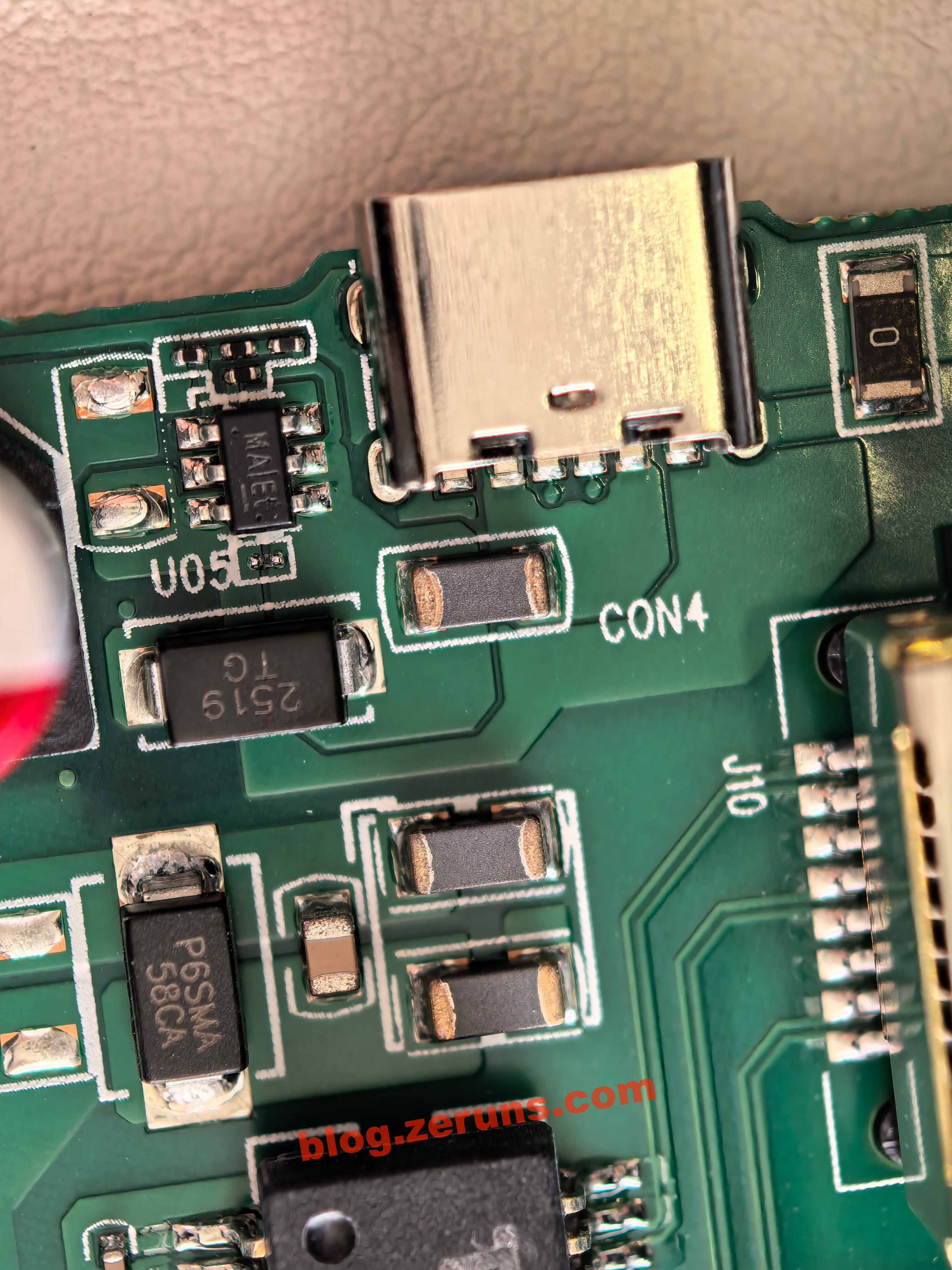
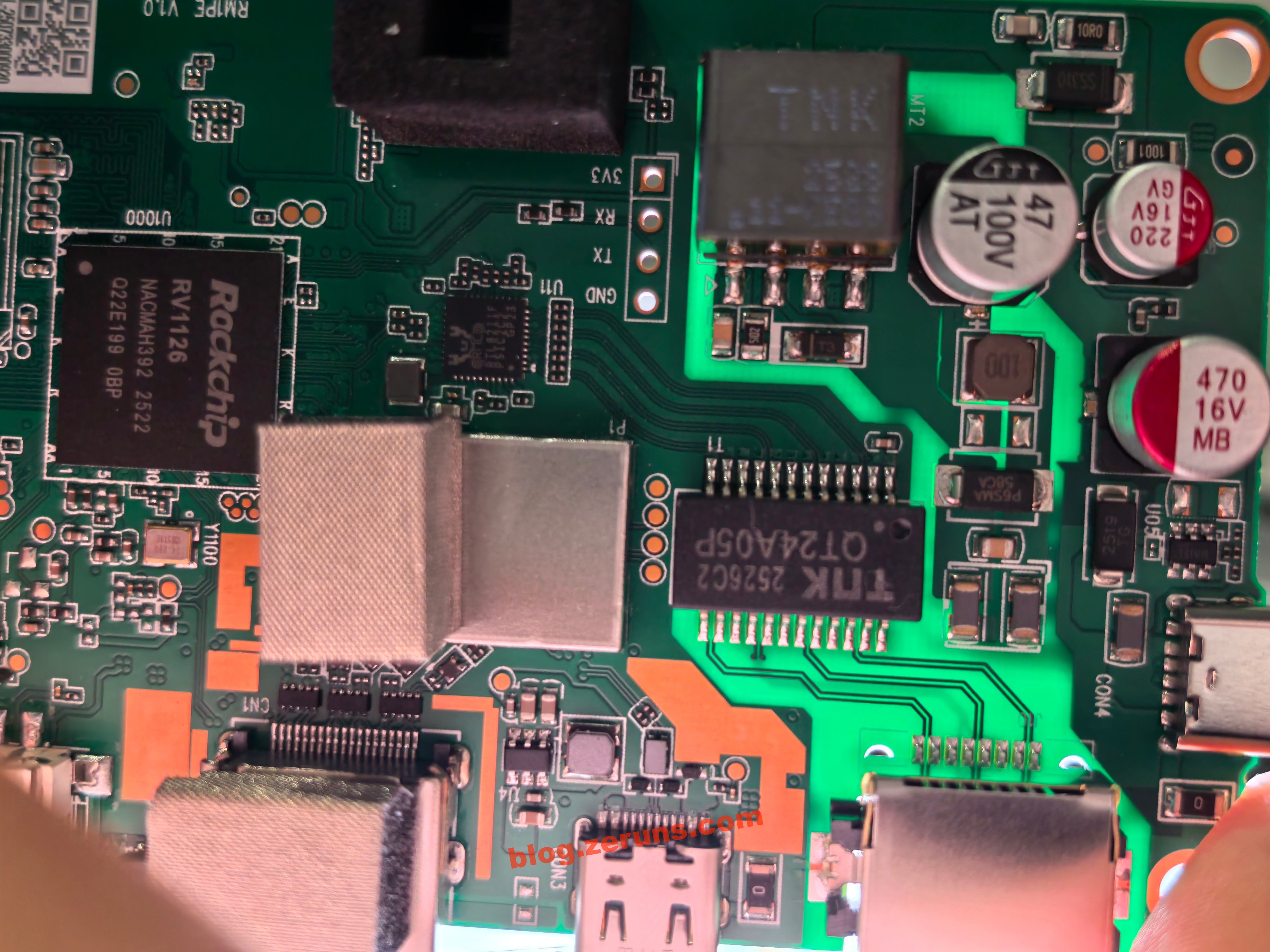
Mặt trước bo mạch chủ: các lỗ qua (via) trên PCB này được chèn đầy keo nhựa, đắt hơn một chút so với công nghệ thông thường là trám bằng sơn dầu.
Chip QT24A05P nằm dưới cổng mạng là một biến áp mạng đơn cổng Gigabit hỗ trợ PoE do TNK (Xunkang Technology) phát triển.
Bên dưới còn có một biến áp khác của TNK, phân tích mạch cho thấy có thể là biến áp nguồn phản hồi (flyback) dùng cho nguồn PoE.
Bên cạnh bộ xử lý ở bên phải là chip có mã W634GU6RB-11, đây là chip nhớ DDR3L 4Gb (512MB) của Winbond, và mặt sau bo mạch chủ còn có một chip cùng loại, tổng cộng bộ nhớ là 1GB.
Tháo lớp chắn điện từ bên cạnh cổng HDMI,
Chip ở góc dưới bên phải của lớp chắn là RV1126 của Rockchip, bộ SoC 4 nhân ARM Cortex-A7 + RISC-V MCU, NPU 2.0Tops, ISP 14M, hỗ trợ mã hóa/giải mã video 4K H.264/H.265.
Chip nằm dưới lớp chắn là RTL8211F của Realtek, chip thu phát PHY Ethernet Gigabit.
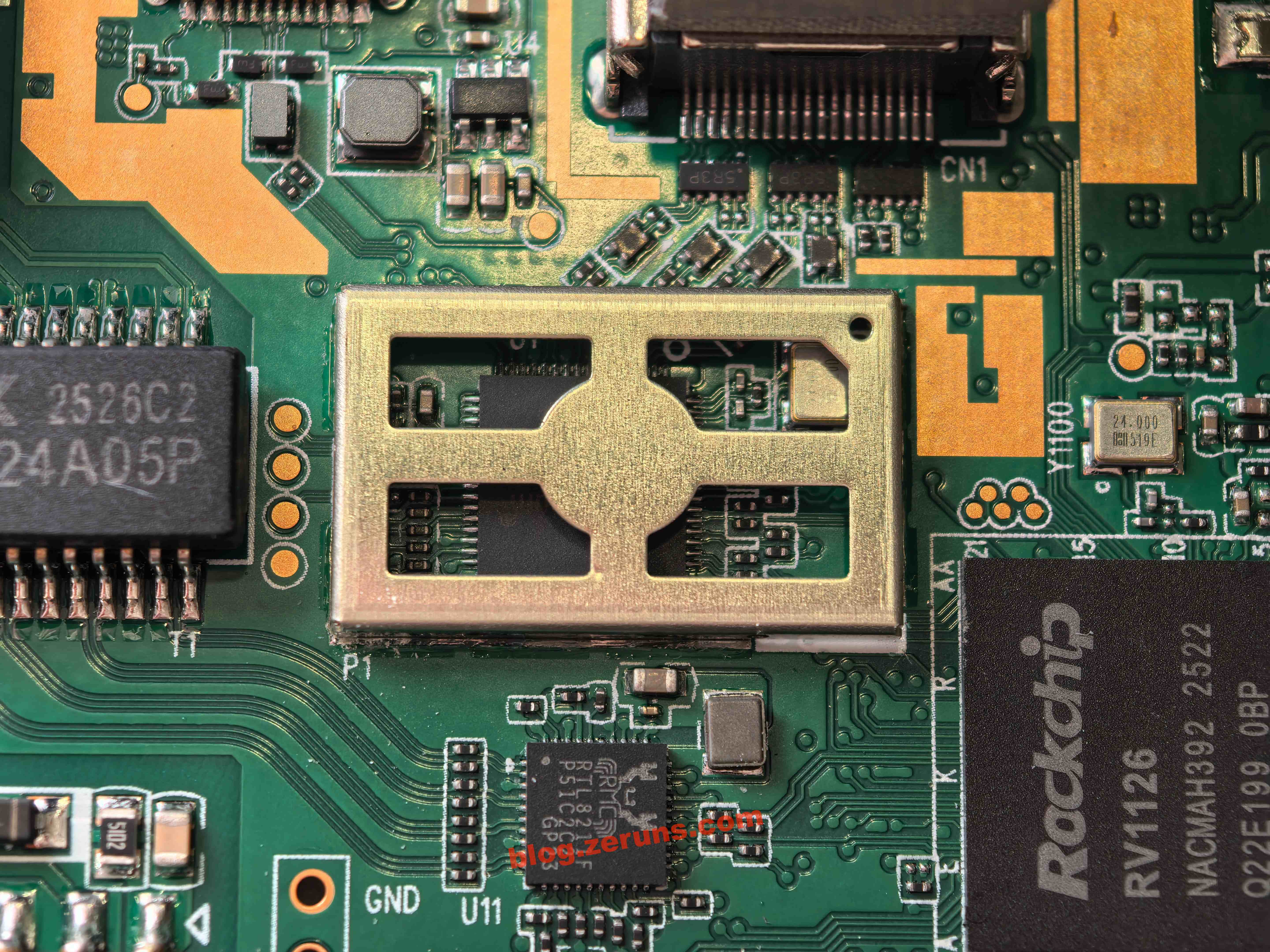
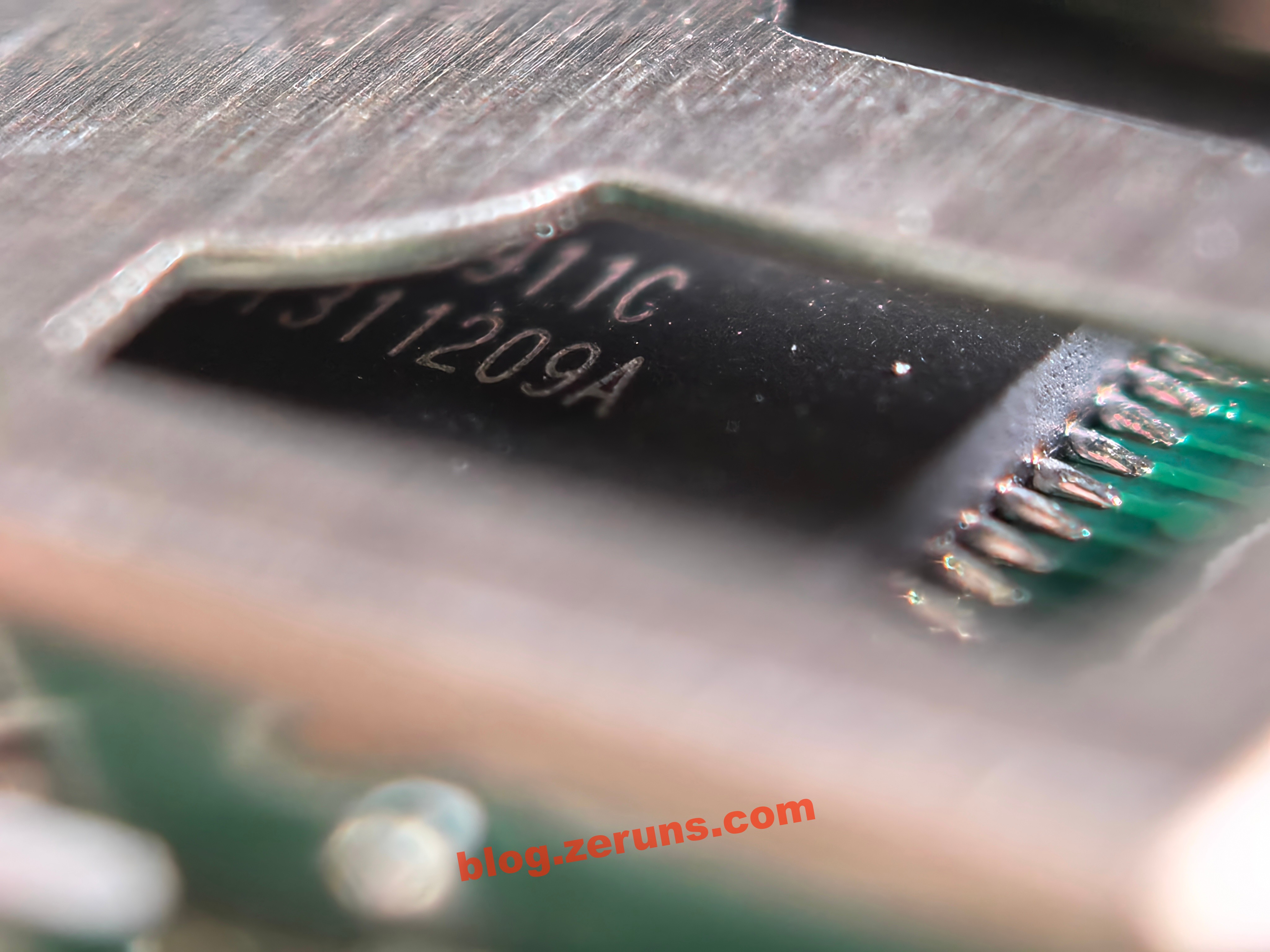
Chip trong lớp chắn điện từ có mã LT6911C, là chip chuyển đổi HDMI sang MIPI/LVDS/CSI của Lontium Semiconductor, hỗ trợ HDMI 1.4, đồng thời có khả năng xử lý âm thanh toàn diện và giao diện điều khiển linh hoạt.
Mặt sau bo mạch chủ,
Bên trái có hai cầu chỉnh lưu, có lẽ là phần mạch cấp nguồn PoE. Chip ở góc trên bên phải có mã TME7350 là IC nhận nguồn PoE tiêu chuẩn của Tollsemi, hỗ trợ PoE 802.3af, tích hợp bộ chuyển đổi kiểu flyback, biến áp flyback nằm ở mặt trước bo mạch.
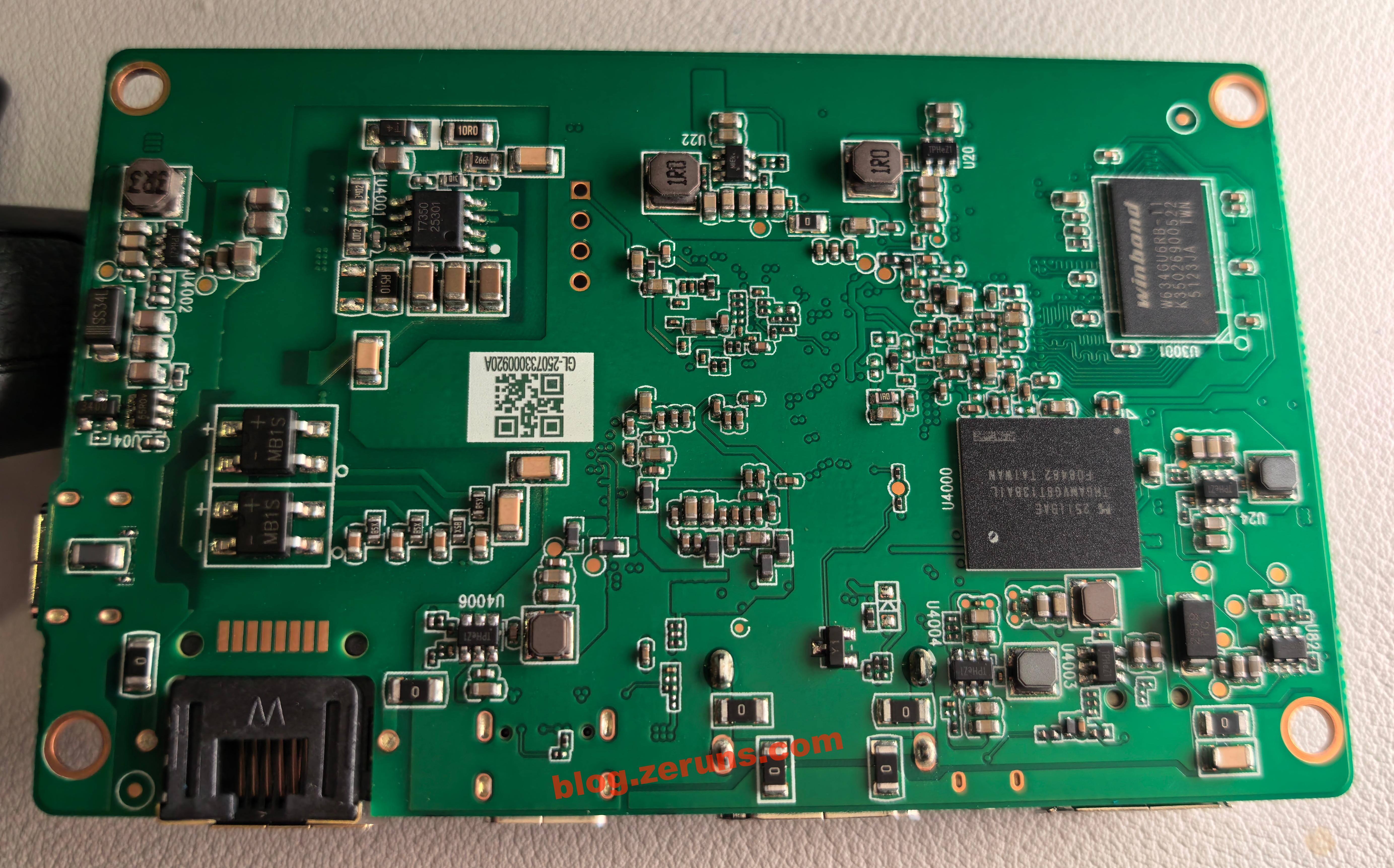
Trên mặt sau bo mạch chủ có một chip mã THGAMVG8T13BAIL, là chip flash e-MMC 5.1 của KIOXIA (Kioxia), dung lượng 32GB, tốc độ tối đa 400MB/s.
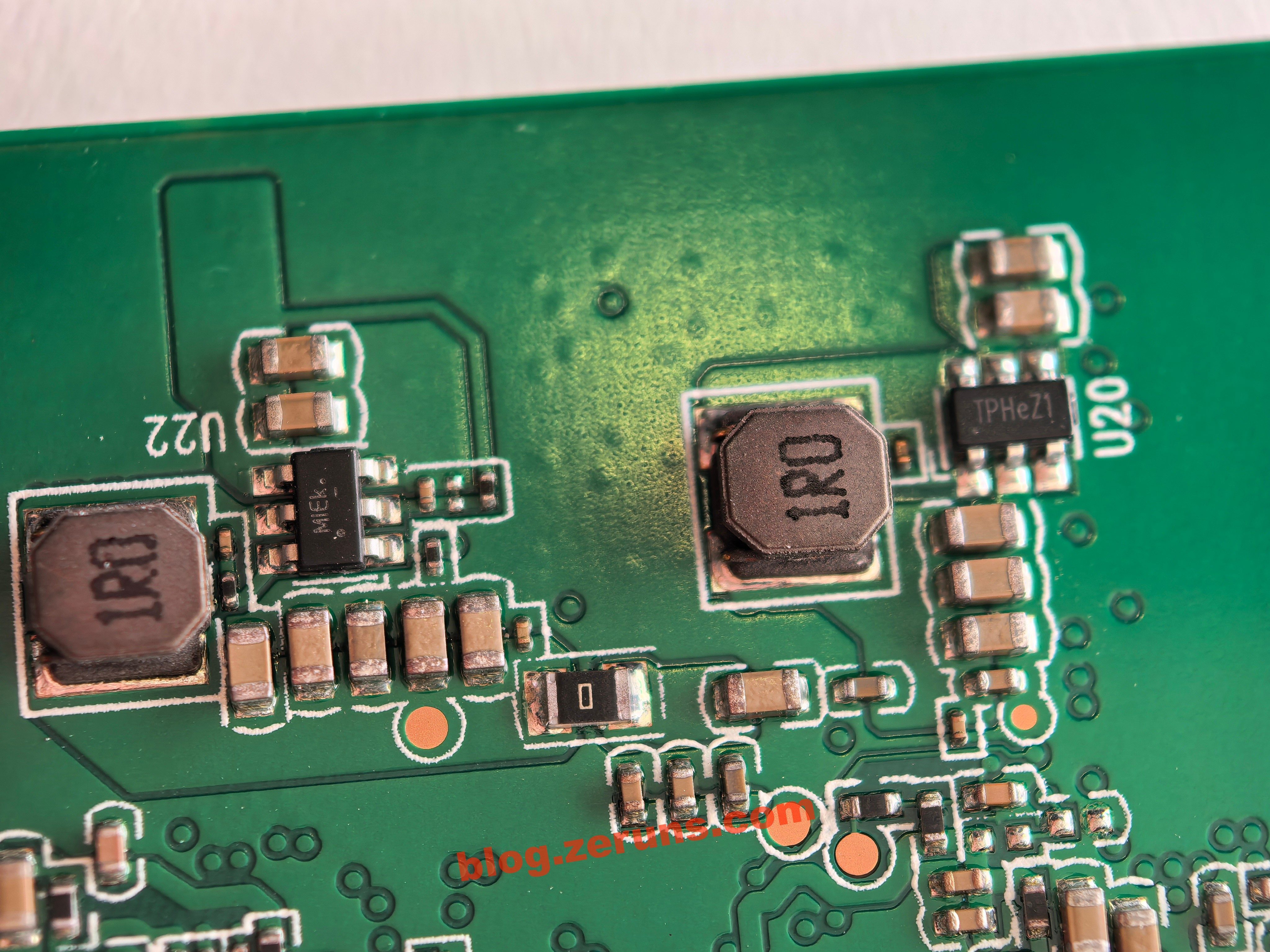
Bên phải còn có một chip nguồn DCDC có ký hiệu in là TPHeZ1, chưa xác định được型号, không tìm thấy tài liệu.

Bên cạnh cổng cấp nguồn Type-C có một chip nguồn DCDC, dựa theo đường mạch thì có thể là mạch tăng áp (Boost).
Các chip nguồn DCDC khác.
Nhìn xuyên qua ánh sáng có thể thấy các lớp mạch bên trong, PCB này ít nhất là loại 4 lớp.
Robot ngón tay FGB-01
Tháo pin ra, vặn ốc.

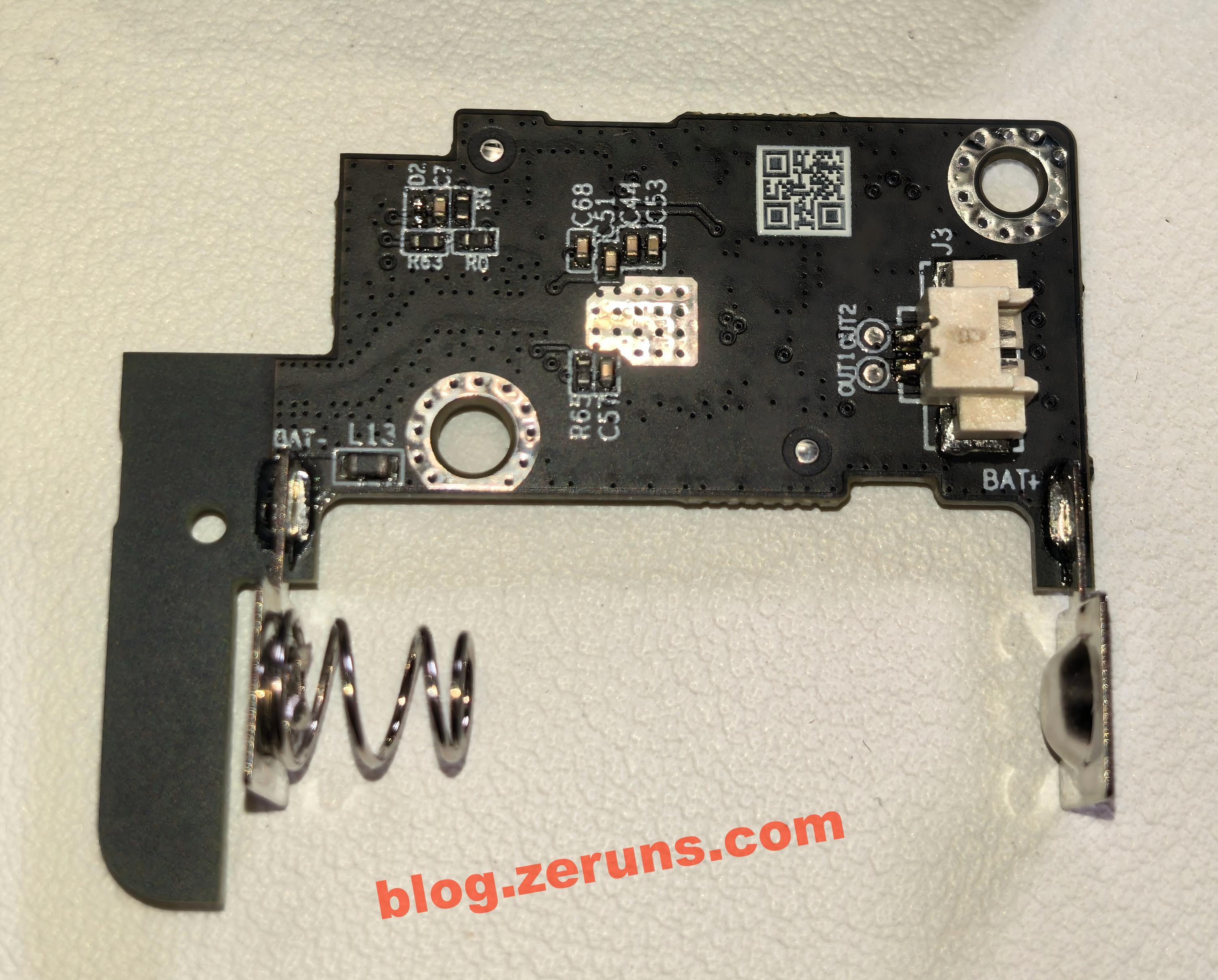
Rút dây nối pin, tháo bo mạch chủ của robot ngón tay.
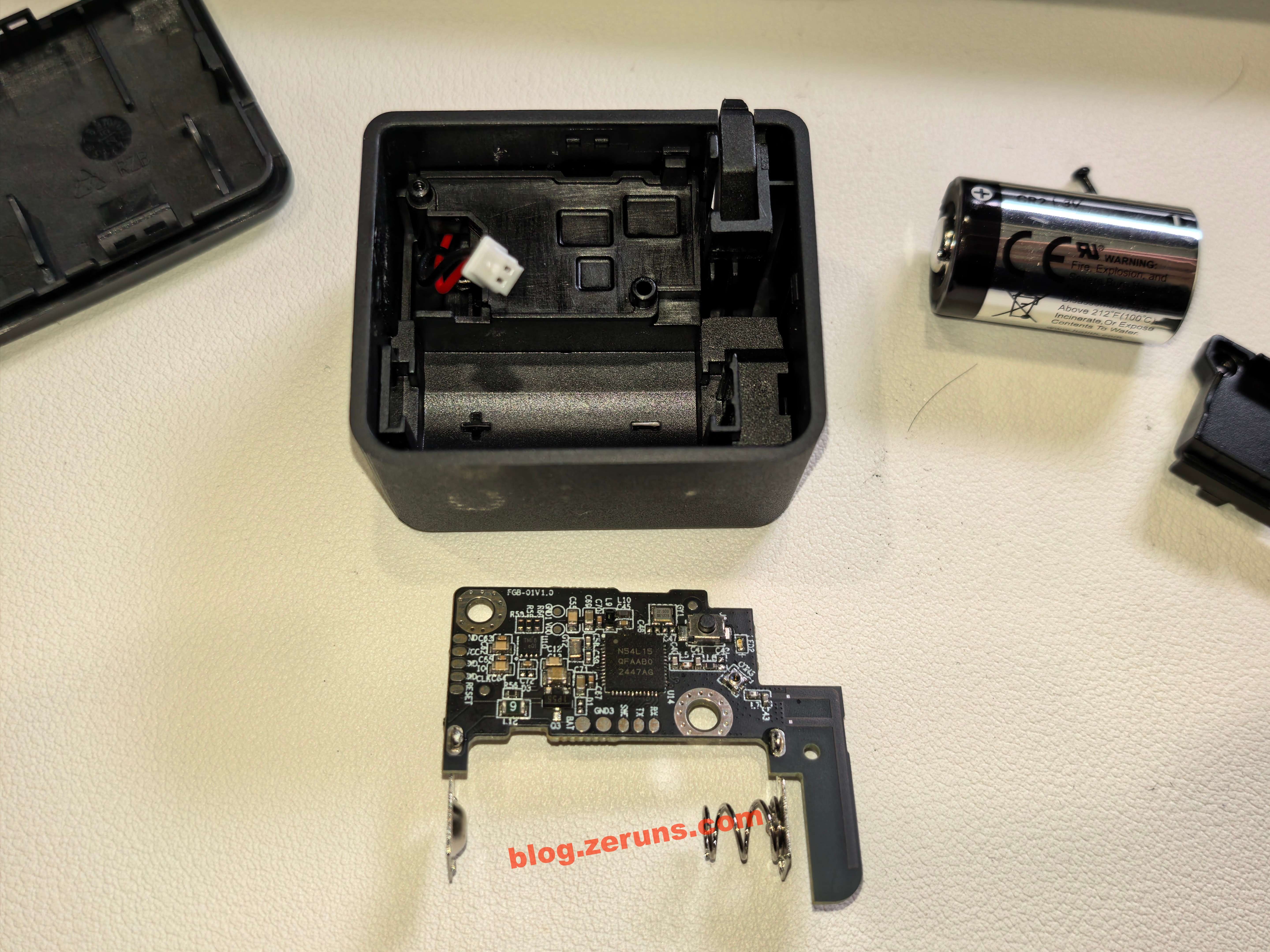
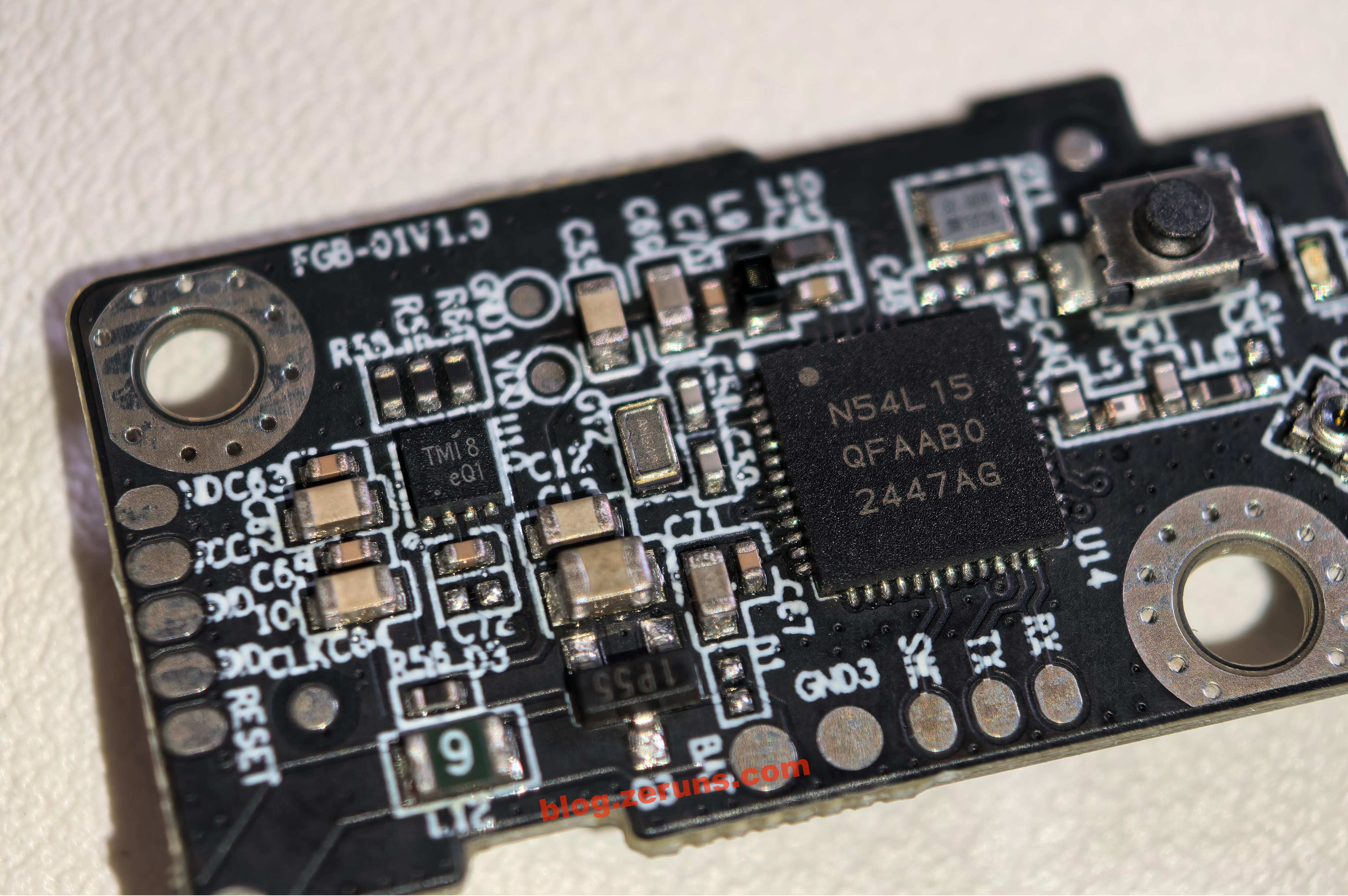
Mặt sau bo mạch chủ.
Chip điều khiển chính có mã nRF54L15, là SoC không dây đa giao thức siêu tiết kiệm điện do Nordic Semiconductor phát triển, sử dụng tiến trình 22nm, tích hợp bộ xử lý Arm Cortex-M33 128MHz và bộ xử lý phụ RISC-V, hỗ trợ các giao thức Bluetooth 5.4/6.0, Thread, Matter. Có 1.5MB NVM và 256KB RAM, hiệu suất RF đạt công suất phát +8dBm và độ nhạy thu -98dBm, đạt chứng nhận bảo mật PSA cấp 3 và thiết kế siêu tiết kiệm điện, phù hợp cho các ứng dụng như nhà thông minh, Internet vạn vật công nghiệp, v.v.
Bên trái còn có một chip ký hiệu TMI8, có thể là chip điều khiển động cơ DC có chổi than, mã có thể là TMI8870D hoặc TMI8180D.
Hình ảnh nhiệt (nhiệt kế hồng ngoại)
Đánh giá mở hộp và hình ảnh chụp thực tế máy ảnh nhiệt UTi261M của Uni-T: https://blog.zeruns.com/archives/798.html
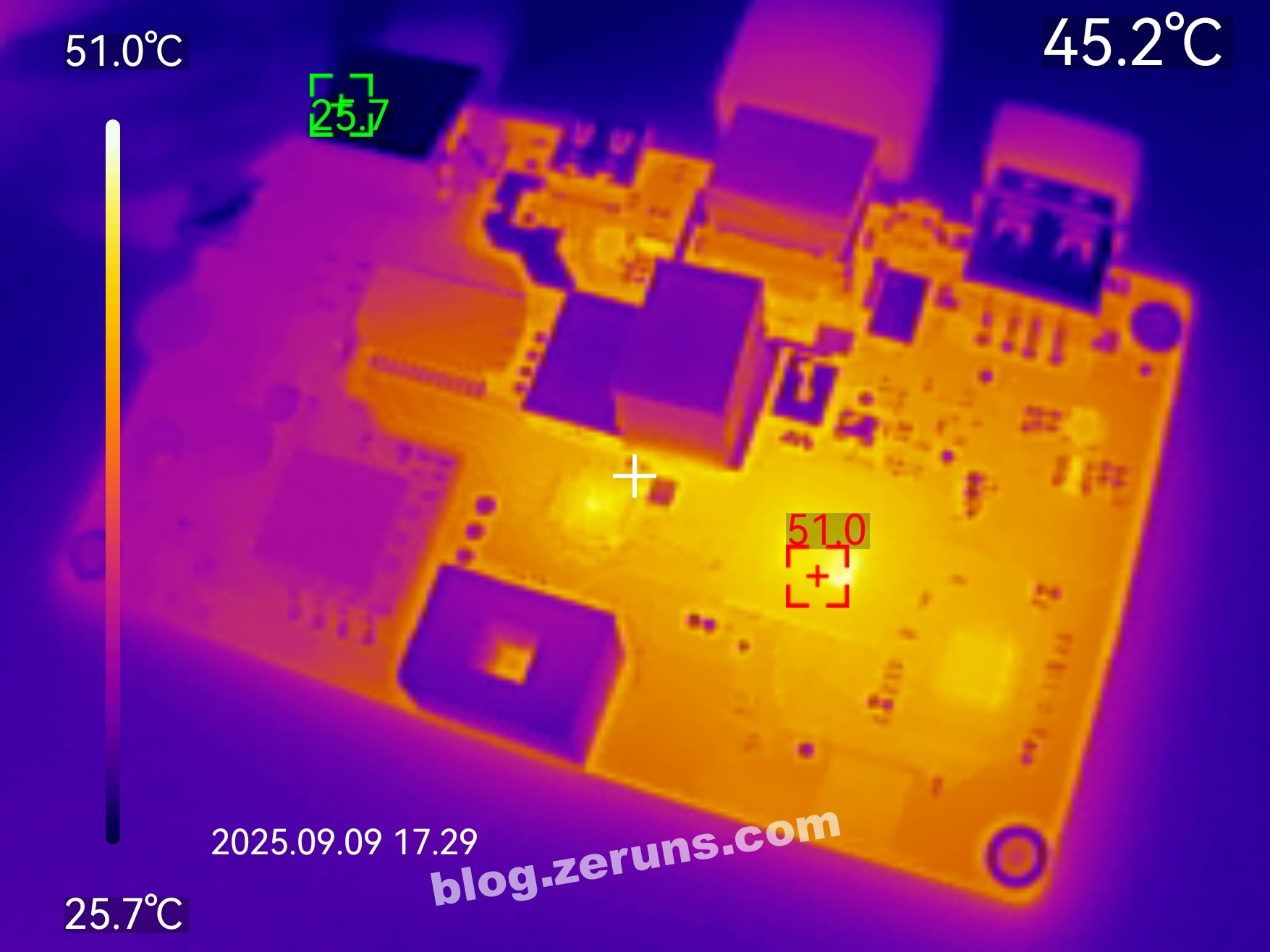
Ảnh nhiệt mặt trước bo mạch chủ sau vài phút hoạt động với cáp HDMI cắm vào, nhiệt độ phòng khoảng 26 độ C, nhiệt độ chip xử lý khoảng 51 độ C.
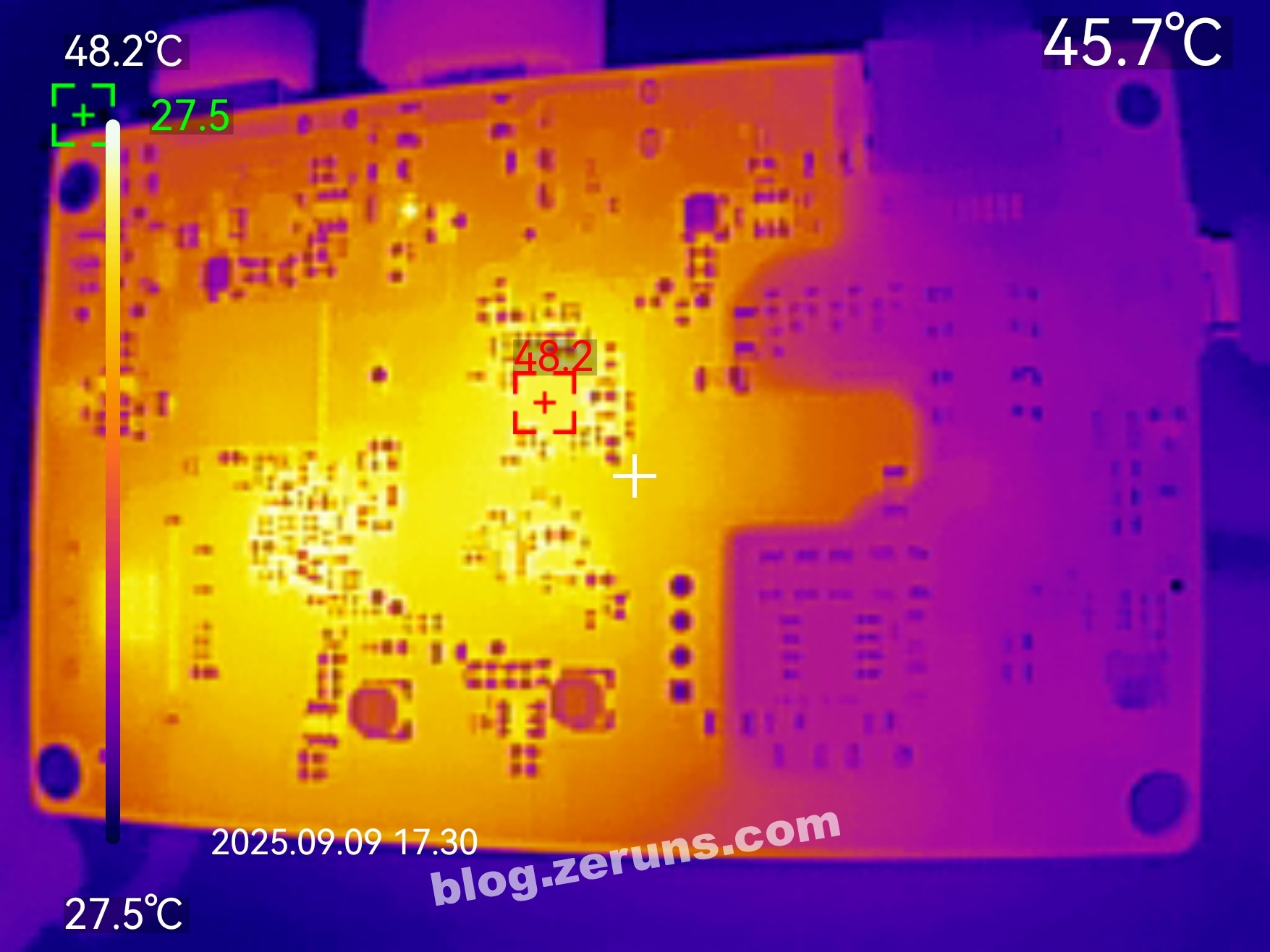
Ảnh nhiệt mặt sau bo mạch chủ, điểm nóng nhất nằm ở đáy chip chuyển đổi HDMI, khoảng 48 độ C.
Bài viết đề xuất
- **Gợi ý VPS/máy chủ đám mây giá tốt và rẻ: ** https://blog.zeruns.com/archives/383.html
- Hướng dẫn tạo máy chủ Minecraft: https://blog.zeruns.com/tag/mc/
- Đánh giá mở hộp và tháo dỡ NanoKVM: https://blog.zeruns.com/archives/840.html
- Đánh giá mở hộp và tháo dỡ laptop cơ khí Code10AI (Ultra7-255H): https://blog.zeruns.com/archives/895.html
- Hướng dẫn xây dựng website bán hàng xuyên biên giới, hướng dẫn làm website ngoại thương bằng WordPress: https://blog.zeruns.com/archives/889.html
Bản tiếng Anh của bài viết: https://blog.zeruns.top/archives/69.html