https://oshwhub.com/zeruns/ji-yu-stm32-de-buck-boost-xing-shu-zi-dian-yuan Estoy replicando y estudiando este proyecto. En la parte del código correspondiente al PID, hay tres modos: BUCK, BOOST y MIX. Sin embargo, he notado que solo en el modo MIX aparece la línea IErr1 = IErr0; (actualización del error histórico del lazo de corriente PID).
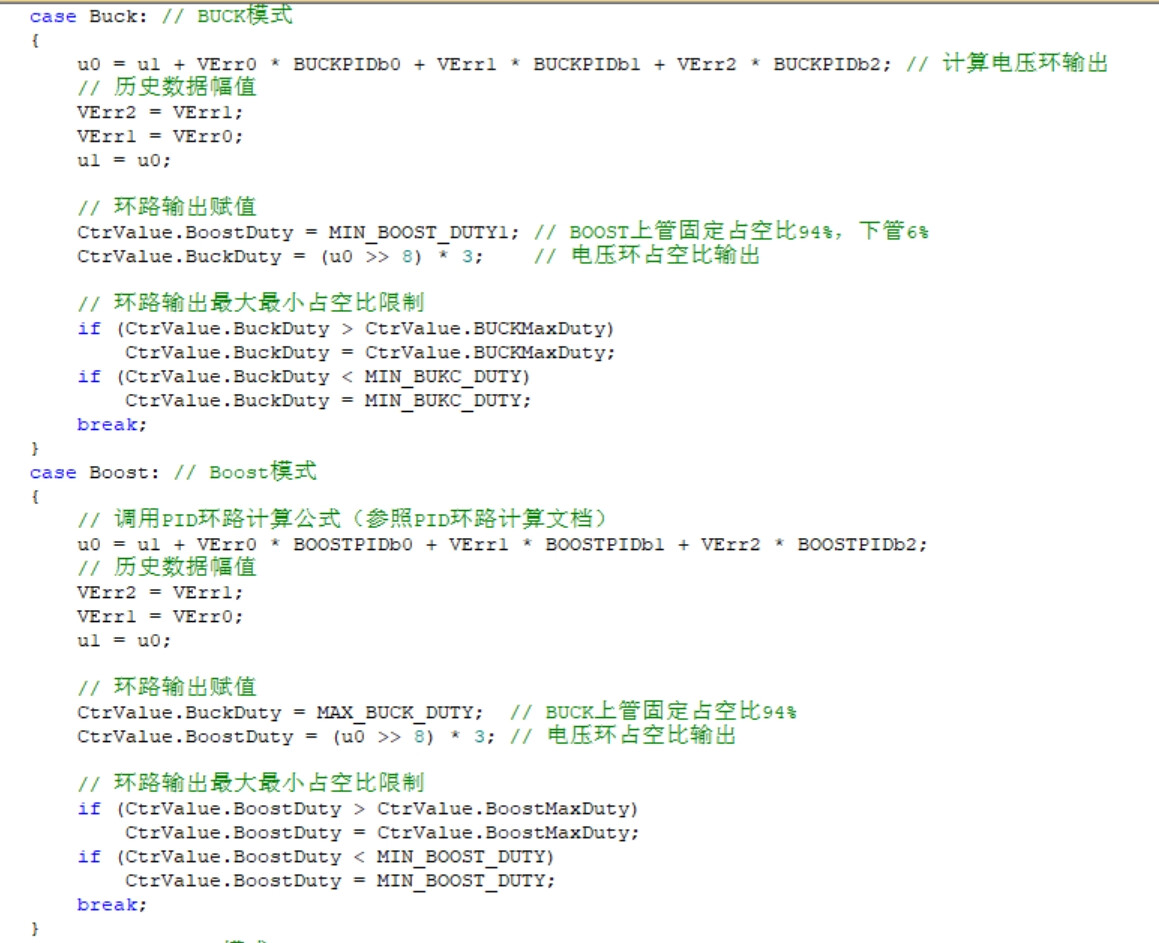
(Imagen del código en los modos BUCK y BOOST, donde en el comentario “// 历史数据幅值” (amplitud de datos históricos) no aparece la línea IErr1 = IErr0;)
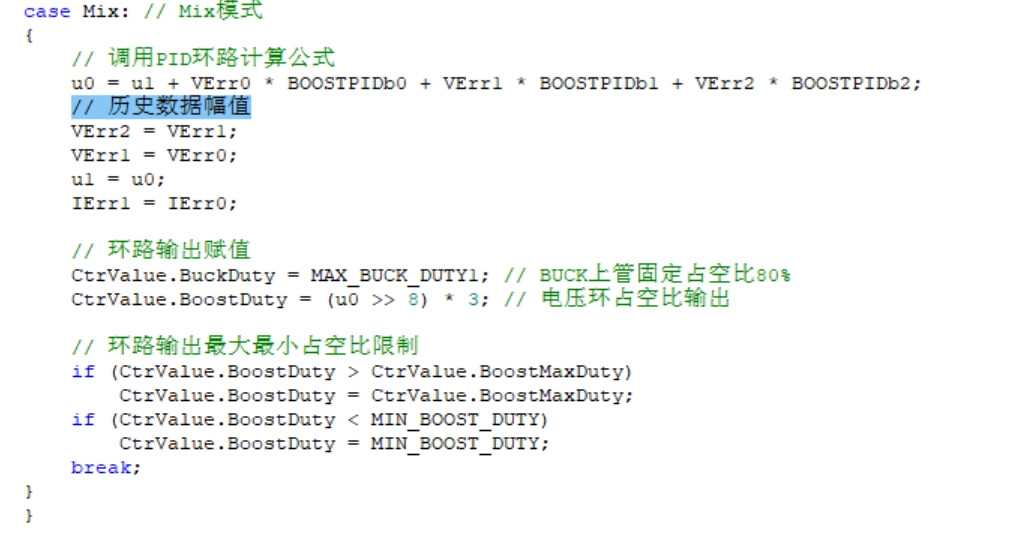
(Imagen del código en el modo MIX, donde en el mismo comentario sí aparece IErr1 = IErr0;)
No termino de entender por qué solo en el modo MIX se realiza la actualización del error histórico del lazo de corriente.