https://oshwhub.com/zeruns/ji-yu-stm32-de-buck-boost-xing-shu-zi-dian-yuan Tôi đang sao chép và học theo dự án này, trong phần mã nguồn có điều khiển PID với ba chế độ: BUCK, BOOST và MIX. Tuy nhiên tôi phát hiện chỉ trong chế độ MIX mới có dòng lệnh IErr1 = IErr0; (cập nhật sai số lịch sử vòng điều khiển dòng điện)
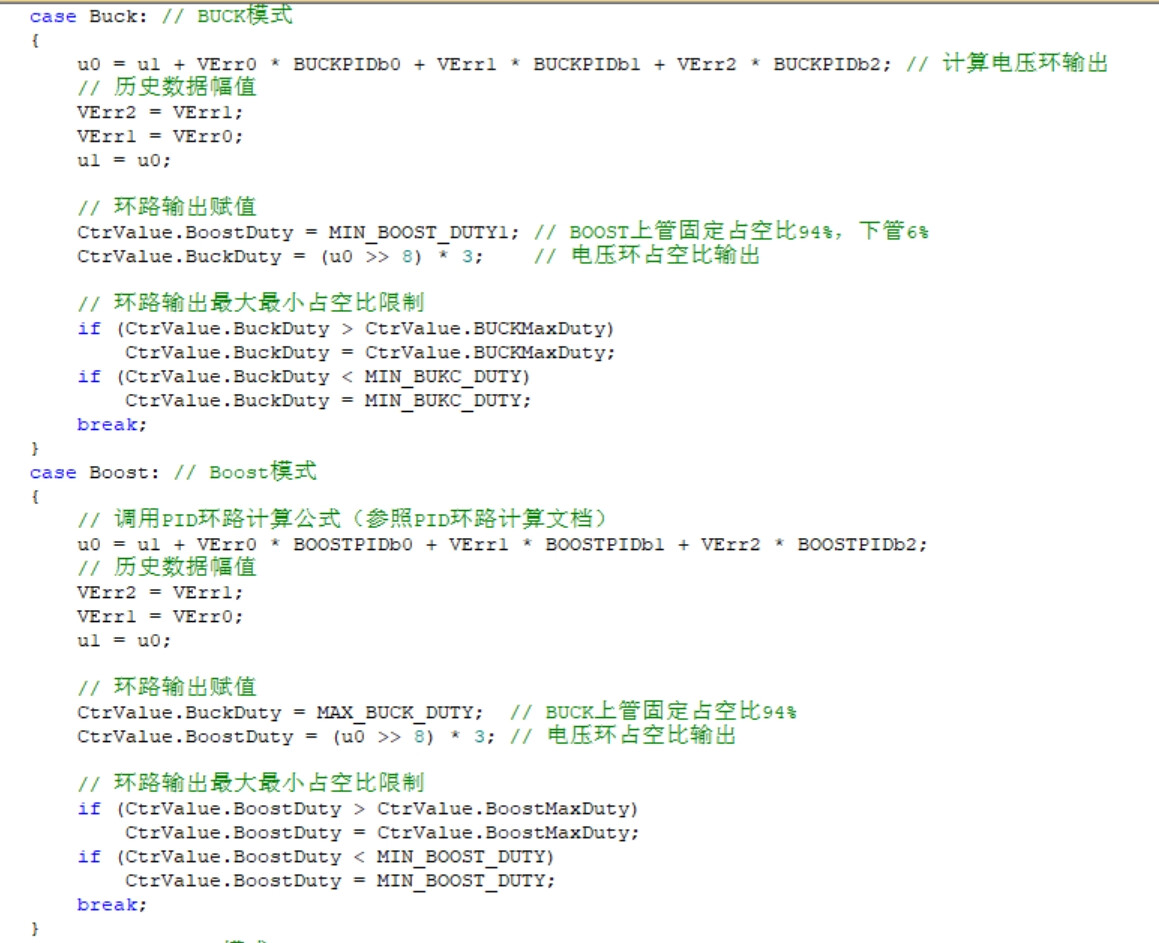
(Hình ảnh mã nguồn ở chế độ BUCK và BOOST, tại phần chú thích (// 历史数据幅值) không có dòng IErr1 = IErr0;)
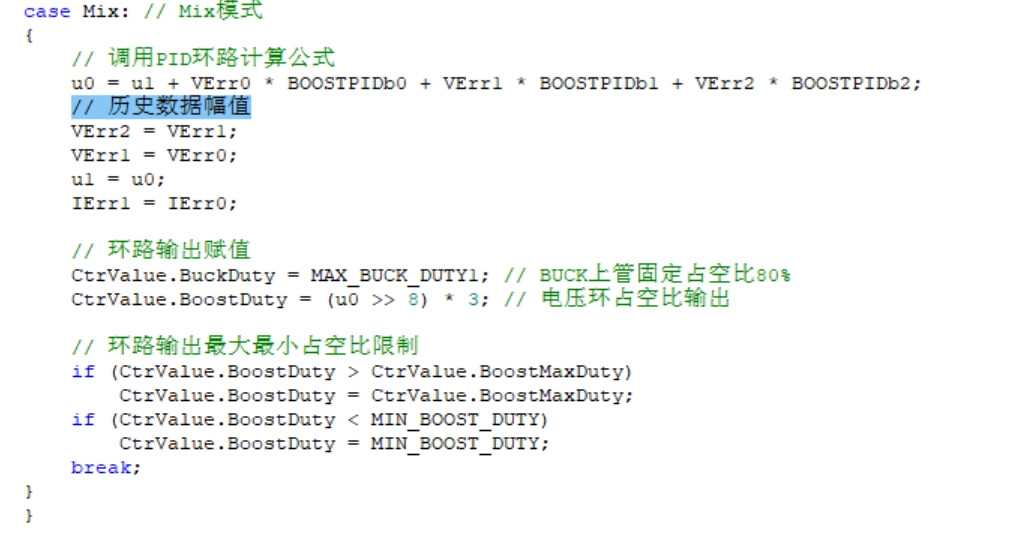
Hình ảnh mã nguồn chế độ MIX, tại phần chú thích (// 历史数据幅值) có dòng IErr1 = IErr0;). Tôi khá thắc mắc tại sao chỉ riêng chế độ MIX mới thực hiện cập nhật sai số lịch sử cho vòng điều khiển dòng điện.