GL-RM1PE と FGB-01 フィンガーロボットの簡単開封レビューと分解:普通のPCをBMCリモート管理可能に
レビュー動画:https://www.bilibili.com/video/BV1kBnNzsEBq/
GL-RM1PE 概要
GL-RM1は、GL.iNet(広聯智通)が提供する幅広い用途に対応したリモートKVMデバイス(IP-KVM)です。このデバイスを使用することで、外出先から自宅のPCをリモート操作したり、ローカルリソースにアクセスしたり、ファイル転送を行うことが可能になります。また、オフラインのデバイスをリモートで制御し、PCの起動障害を処理したり、BIOS設定を調整したりすることもできます。オーディオサポート機能により、より没入感のあるリモート操作体験を提供します。リモートオフィスワークからデバイス管理まで、多様なシーンで活用可能なGL-RM1は、リモート操作の効率を大幅に向上させます。
GL-RM1PEは、GL-RM1のPoE対応モデルで、単一ケーブルによる簡単セットアップを目的として設計されています。GL-RM1PEは、1本のイーサネットケーブルで電源供給とネットワーク接続を同時に実現し、配線の複雑さを解消し、設置を簡素化します。また、このモデルではeMMCストレージ容量が32GBにアップグレードされており、システムログの処理、録画、カスタムファームウェアの使用などに優れたパフォーマンスを発揮します。
- GL-RM1PEユーザーガイド:https://docs.gl-inet.cn/kvm/user_guide/gl-rm1pe/
- GL-RM1PE購入リンク:https://s.click.taobao.com/yyVXdXq
FGB-01 フィンガーロボット 概要
FGB-01は、GL.iNetがKVMデバイス向けに提供するオプションアクセサリで、リモート管理の利便性をさらに高めます。
フィンガーロボットは物理的なボタンを模倣する装置で、制御対象のデバイスにある電源ボタンをリモートで押すことを可能にします。物理ボタンのシミュレーターとして、PCのリモート起動/シャットダウンに最適化されています。貼り付けるだけで簡単に設置でき、電池寿命は最大1年と長く、日常使用に適しており、複雑な設定は不要です。
また、オプションでGL-ATXボードを選択することも可能です。GL-ATXボードはPCケース内に取り付け、電源ボタンの配線(F_PANEL)を介して直接電源のオン/オフなどの操作を制御できます。
使用シーン
- サーバールームの集中管理:1本のネットワークケーブルによるPoE給電で配線がシンプルになり、サーバーの映像と稼働状況をリモートで監視・電源操作や障害対応が可能。
- 企業のリモートメンテナンス:ハードウェアレベルのリモート制御により、制御対象のデバイスがネット接続されていなくても、OSが起動していなくても、ブルースクリーンや起動不能などの問題を迅速に解決し、現地点検コストを削減。
- リモートでのシステムインストール・メンテナンス:ISOイメージをマウントして仮想CD/DVDやUSBドライブとして利用し、リモートでOSのインストール・再インストールやファームウェアのアップグレードを実施。大量デプロイにも対応。
- 無人デバイスの管理:PoE対応により屋外・産業用途にも適し、アクセサリと組み合わせて電源をリモート制御し、リアルタイムで稼働状況を確認。メンテナンスフリーな運用が可能。
スペック
| 特徴 | GL-RM1PE | GL-RM1 | その他 |
|---|---|---|---|
| 遅延 | 約30-60ms | 約30-60ms | >100ms |
| イーサネット速度 | 1Gbps | 1Gbps | 100Mbps |
| 電源方式 | PoE/DC | DC | DC |
| 解像度 | 3840x2160@30FPS | 3840x2160@30FPS | 1920x1200@60FPS |
| BIOSレベルアクセス | 対応 | 対応 | 対応 |
| macOS/Windows\u003cbr\u003eアプリケーション対応 | サポート | サポート | 非サポート |
| リモートオーディオ | 双方向 | 単方向 | なし |
| リモートファイル転送 | サポート | サポート | 非サポート |
| ファイル転送速度 | 25MB/s | 10MB/s | 非サポート |
| リモートシステムインストール | サポート | サポート | サポート |
| ストレージ容量 | 32GB eMMC | 8GB eMMC | 128MB |
| 外装 | アルミ合金 | CNC金属 | PVCプラスチック |
開封
GL-RM1PE
箱の表側

箱の側面。会社の公式サイトアドレスと同梱品リストが記載されています:
- GL-RM1PE リモートKVM
- LANケーブル
- USBケーブル(Type A - Type C)
- USBケーブル(Type C - Type C)
- HDMIケーブル
- 取扱説明書
箱の底面。会社名と住所が記載されています。

箱を開けると、最初に取扱説明書と本体があり、その下にアクセサリーや各種ケーブルが収納されています。

GL-RM1PE取扱説明書
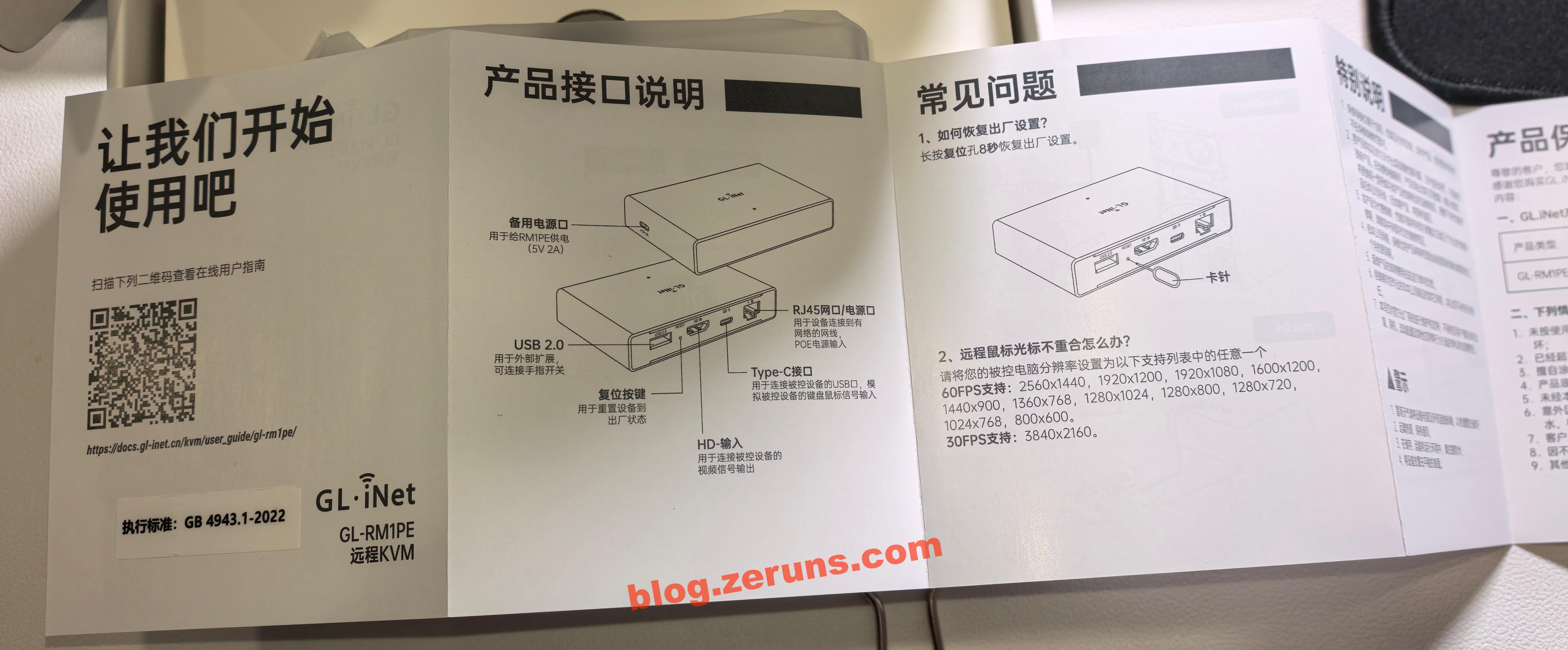
GL-RM1PE本体および付属ケーブル。背面には以下のインターフェースがあります:USB-A(GL-ATXボードまたはFGB-01手指ロボット接続用)、HDMI(制御対象PCの映像信号入力用)、Type-C(制御対象PCにキーボード・マウスを擬似接続するため)、RJ45ネットワークポート(PoE給電対応)。側面にはType-C電源ポート(5V給電、PD対応)があります。

FGB-01 手指ロボット開封
箱の表側

箱の底面。会社名と同梱品リストが記載されています:
- 手指ロボット(FGB-01)
- アクセサリーキット
- 取扱説明書

箱を開けると、まず取扱説明書があります。
その後、手指ロボット本体とアクセサリーが現れます。

付属品は、3M製両面テープ2枚とクリップ(ノートパソコンに取り付けて手指ロボットを固定するために使用可能)です。

評価および使用方法
GL-RM1PE
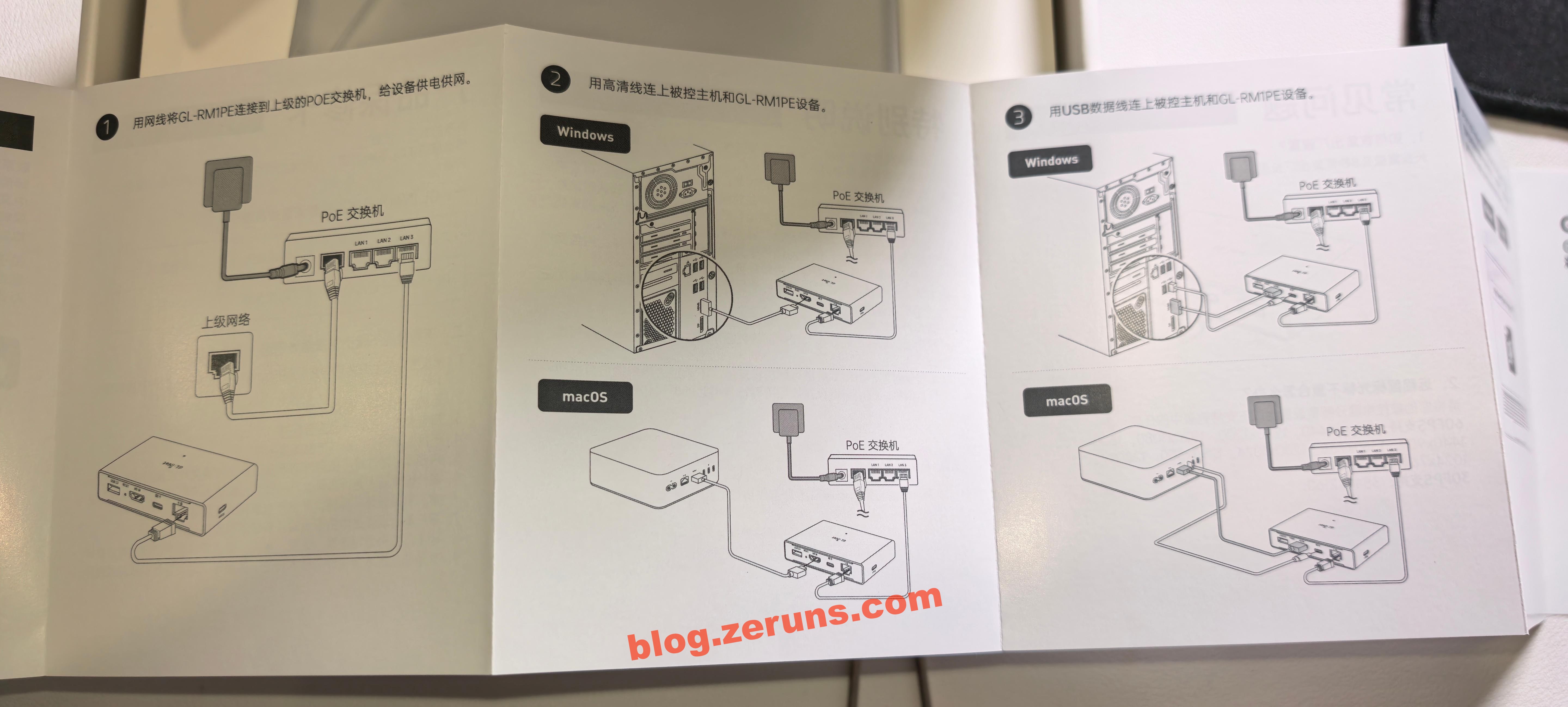
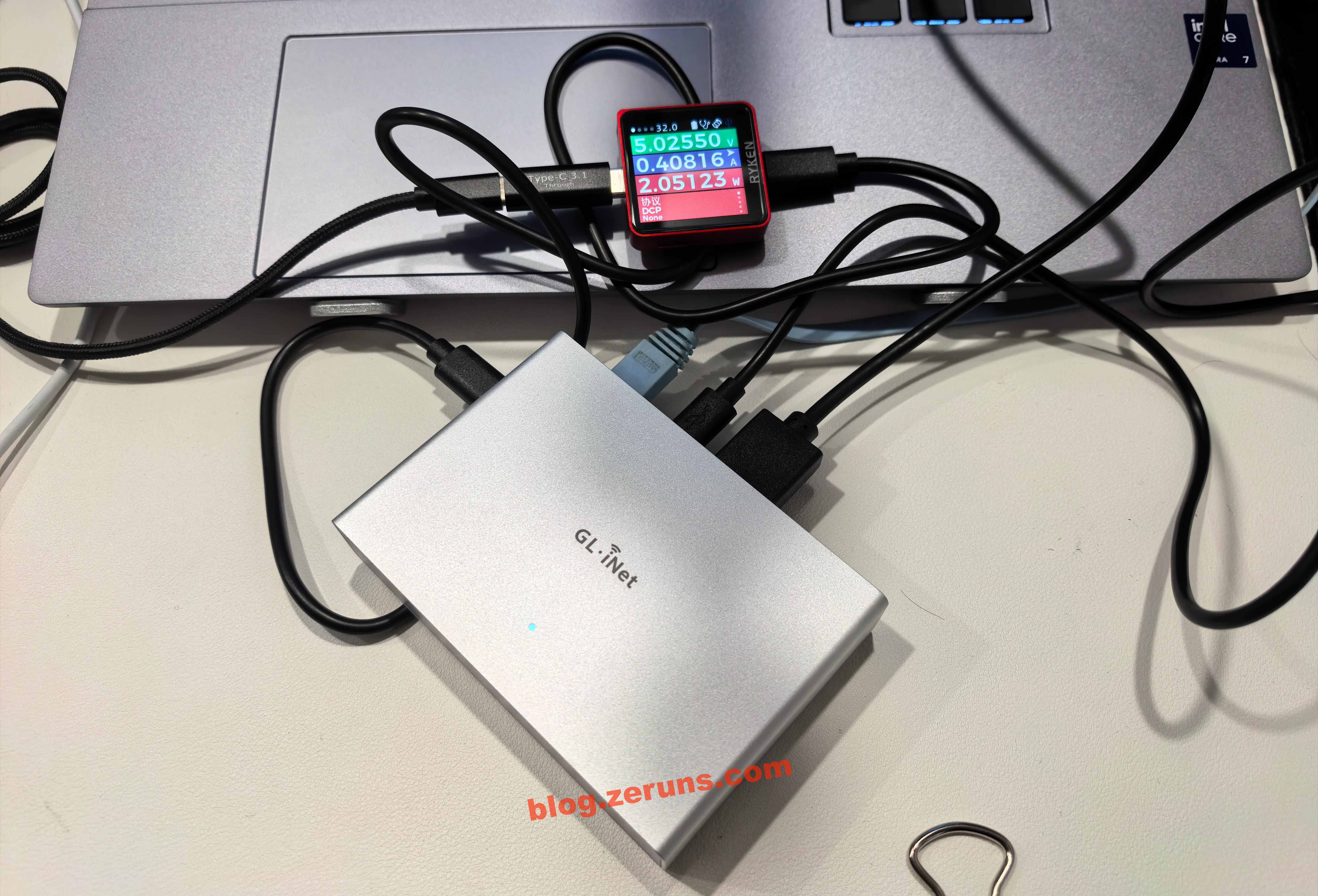
まず、GL-RM1PEのHDMIポートとType-Cポート(HDMI横)を制御対象のPCに接続し、LANケーブルと電源ケーブル(側面のType-Cポート)も接続します。
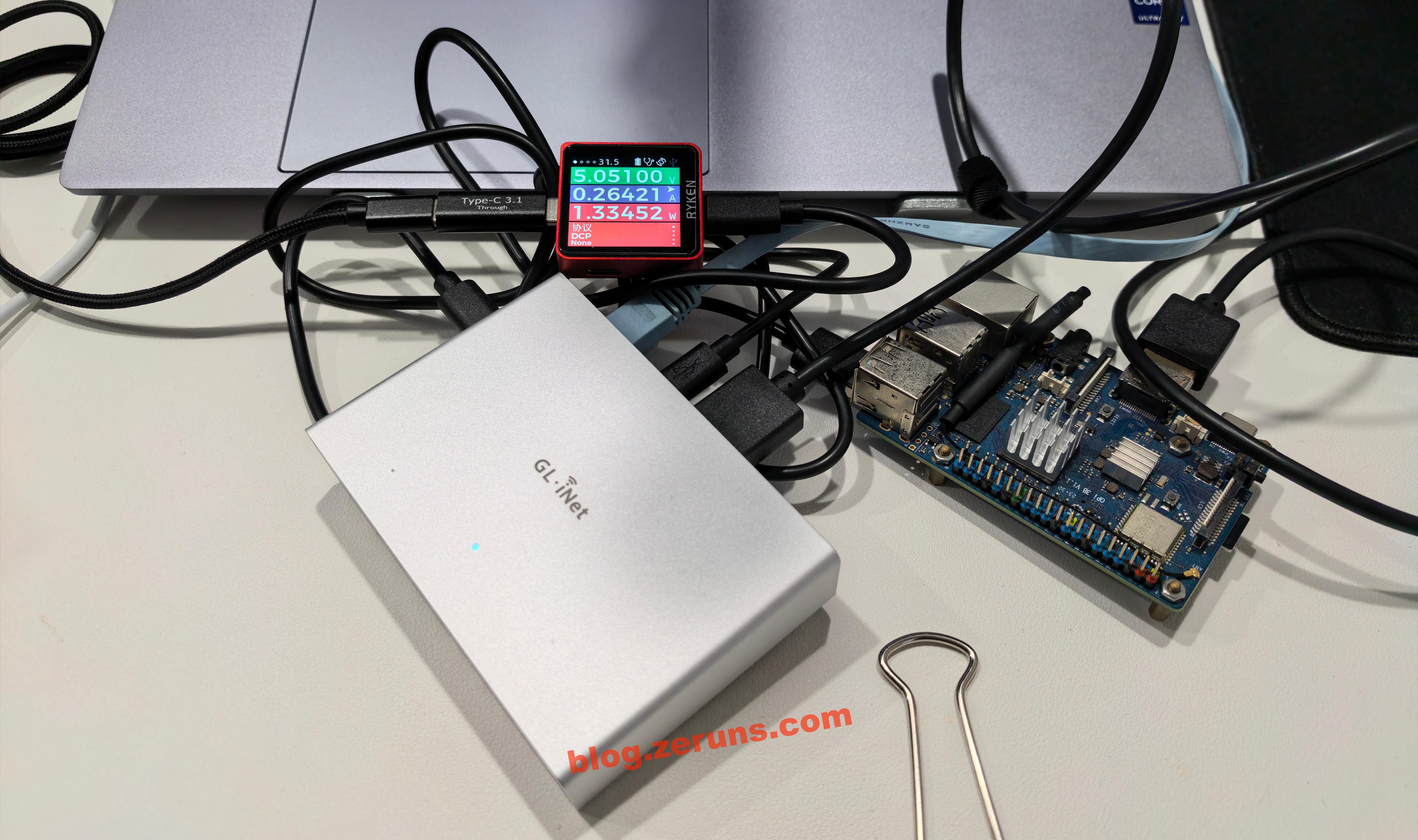
GL-RM1PEのLEDが白色で常時点灯すれば起動完了です。起動後、消費電力は約2ワットです。
USB電流計:https://s.click.taobao.com/bQtCNLq
起動後、ルーターの管理画面でこのデバイスのIPアドレスを確認し、ブラウザのアドレスバーにコピーすればコントロールページが開きます。初回アクセス時はパスワードの設定が必要です。また、GL.iNet公式サイトから専用クライアントをダウンロードして、同一ネットワーク内でデバイスを検索・登録することも可能です。同一ネットワーク外の場合でも、デバイスのSNシリアル番号を入力することで登録できます。登録後は、どこにいてもクライアントアプリを使ってリモート操作が可能になります。また、Tailscale(GL-RM1PE内蔵のTailscaleクライアント)を使用して仮想LANを構築し、リモートアクセスすることもできます。
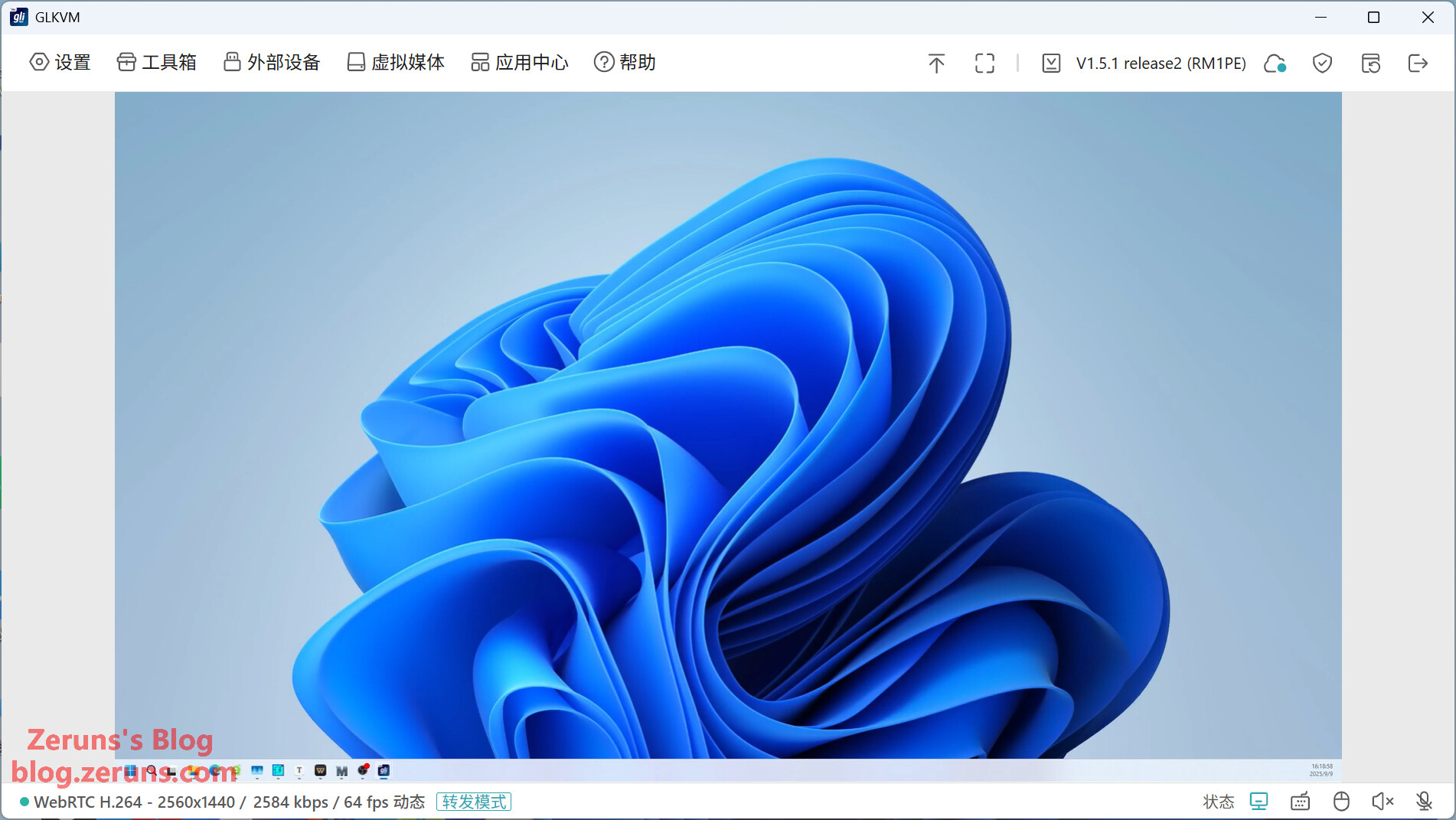
映像は非常にスムーズです。詳細な動作は上記の評価動画をご覧ください。
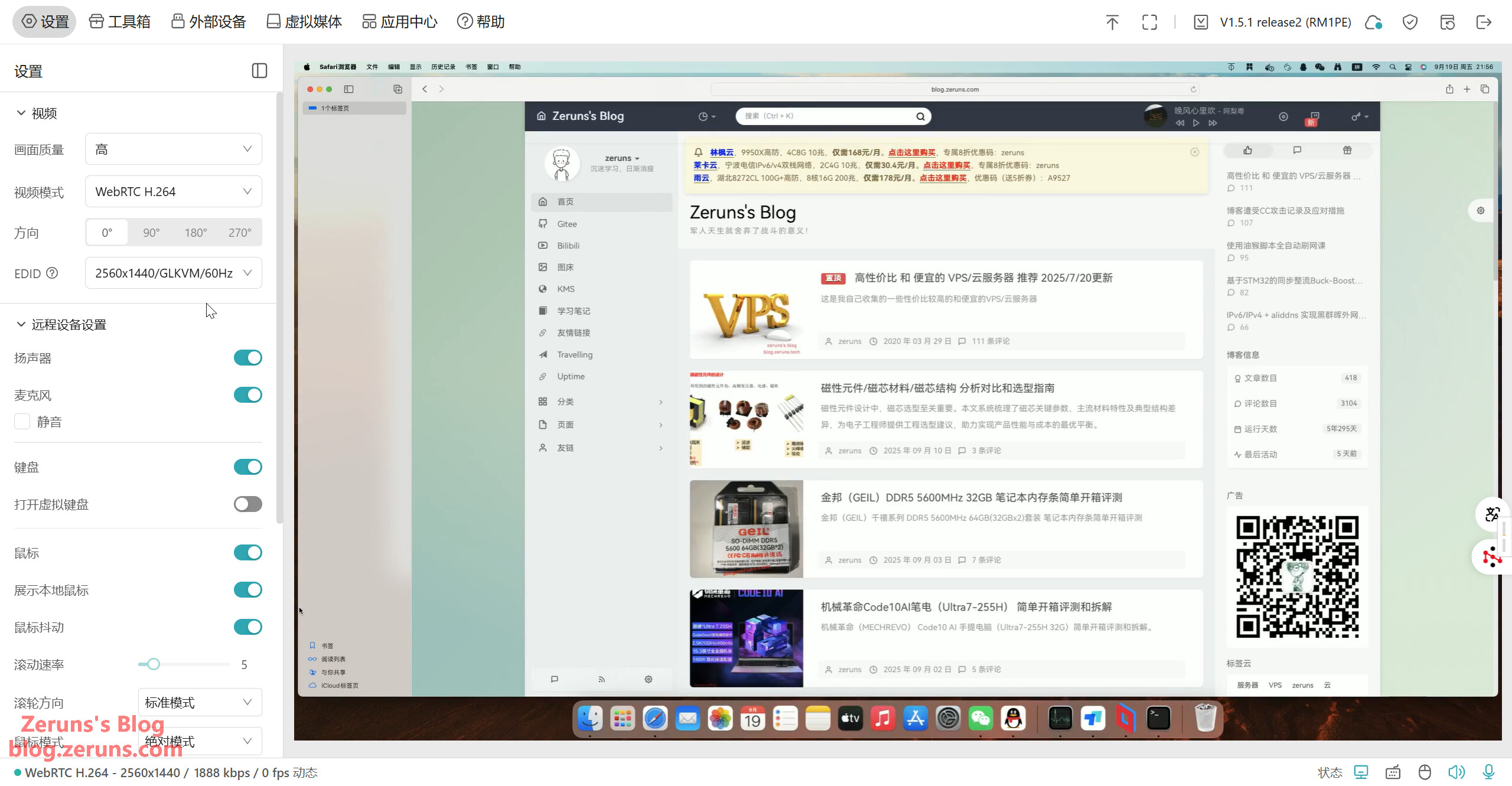
HDMIポートのEDID情報を編集可能で、最大4K30fpsに対応しています。ただし、ビデオエンコードはH.264のみサポートしています。

ローカルのマイク音声を制御対象デバイスに送信可能(制御先ではUSB経由でマイクを擬似接続)であり、制御対象デバイスのスピーカー音声をこちらに転送して再生することも可能です。また、仮想キーボード機能もあります。
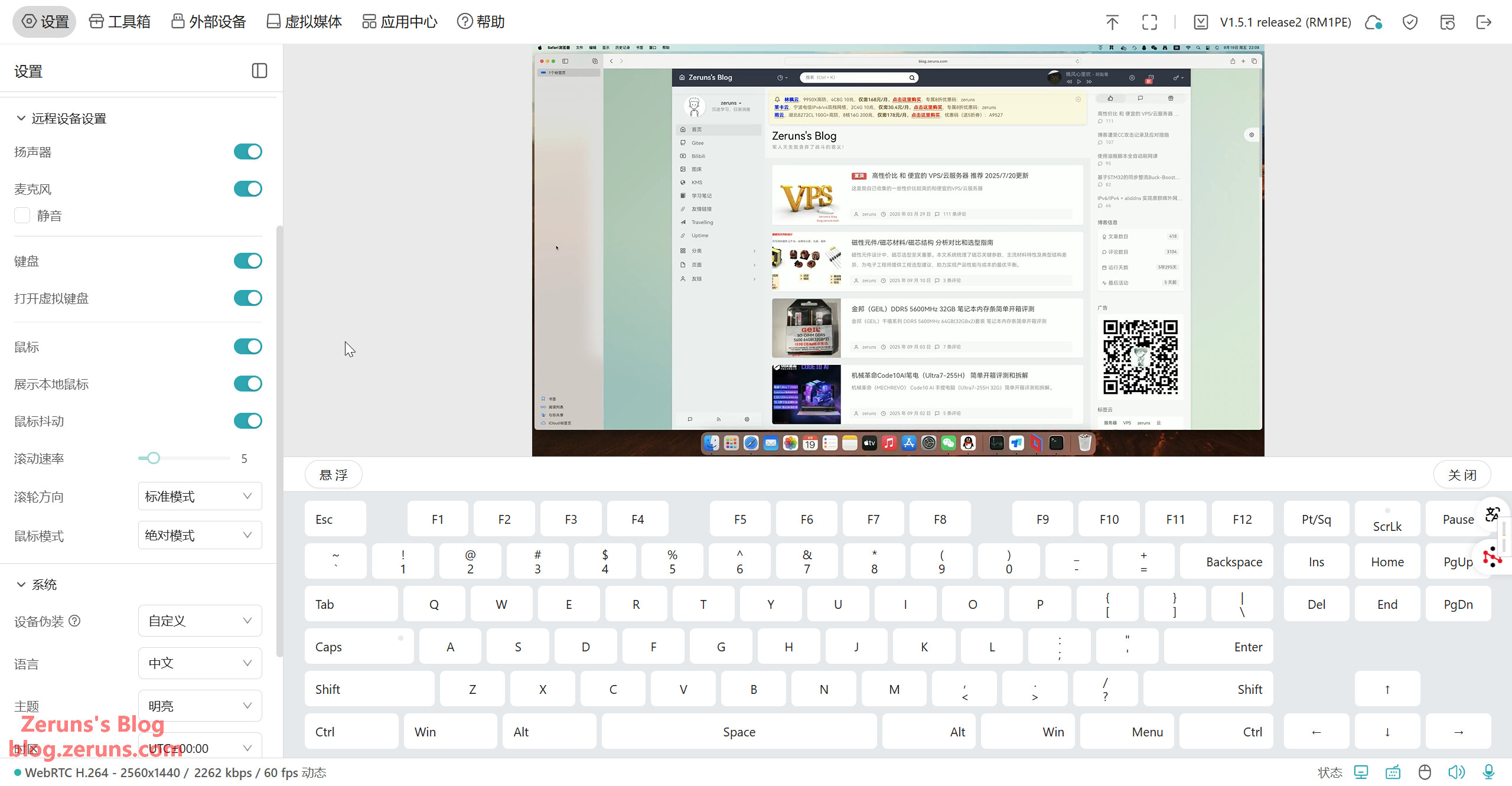
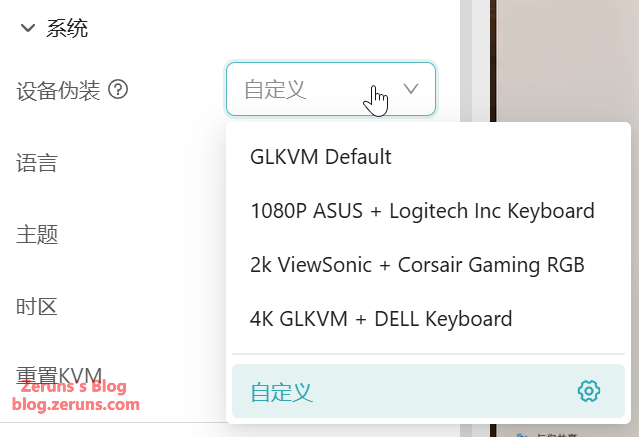
デバイス偽装機能にも対応しています。
ツールボックス内のクリップボード機能を使えば、テキストをリモートデバイスにコピー&ペーストでき、ショートカットキーの使用や、LAN内のデバイスのWake-on-LANによる起動も可能です。

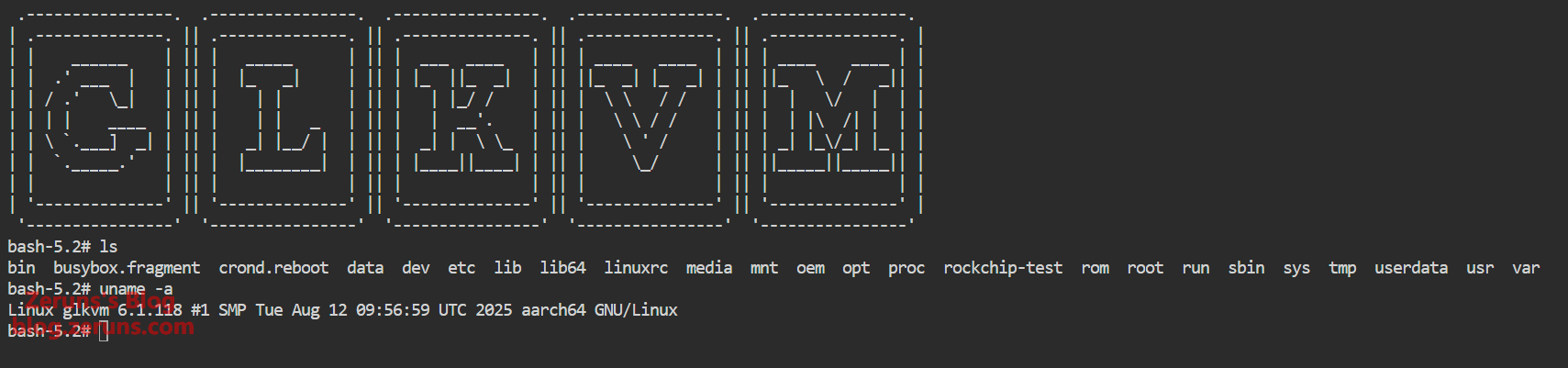
「ターミナル」機能を使うと、GLKVMシステムのターミナルにアクセスでき、GL-RM1PEがLinux 6.1カーネルを搭載していることが確認できます。
GL-RM1PEに手指ロボットまたはGL-ATXボードを接続すると、「外部デバイス」メニューから制御対象デバイスの電源ボタン操作が可能になり、電源ボタンの押下時間も設定できます。

「仮想メディア」では、ファイルをアップロードしてUSBメモリのように制御対象デバイスに転送したり、ISOイメージファイルを読み取り専用のCD-ROMとしてマウントし、OSの再インストールなどの操作を行えます。

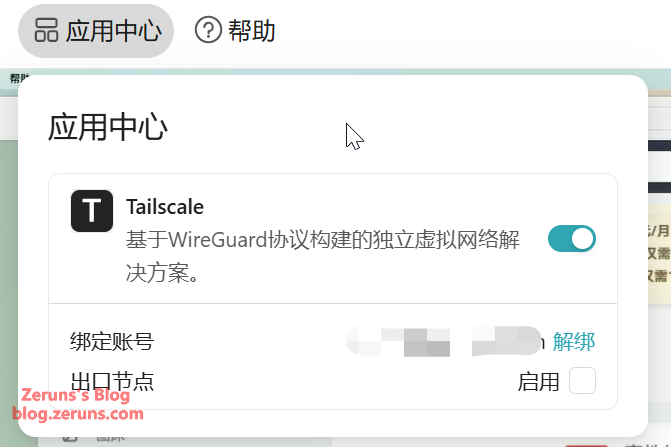
アプリセンターにはTailscaleが搭載されており、NATトラバーサル(内網穿透)を実現し、外出先からでもリモート操作が可能になります。
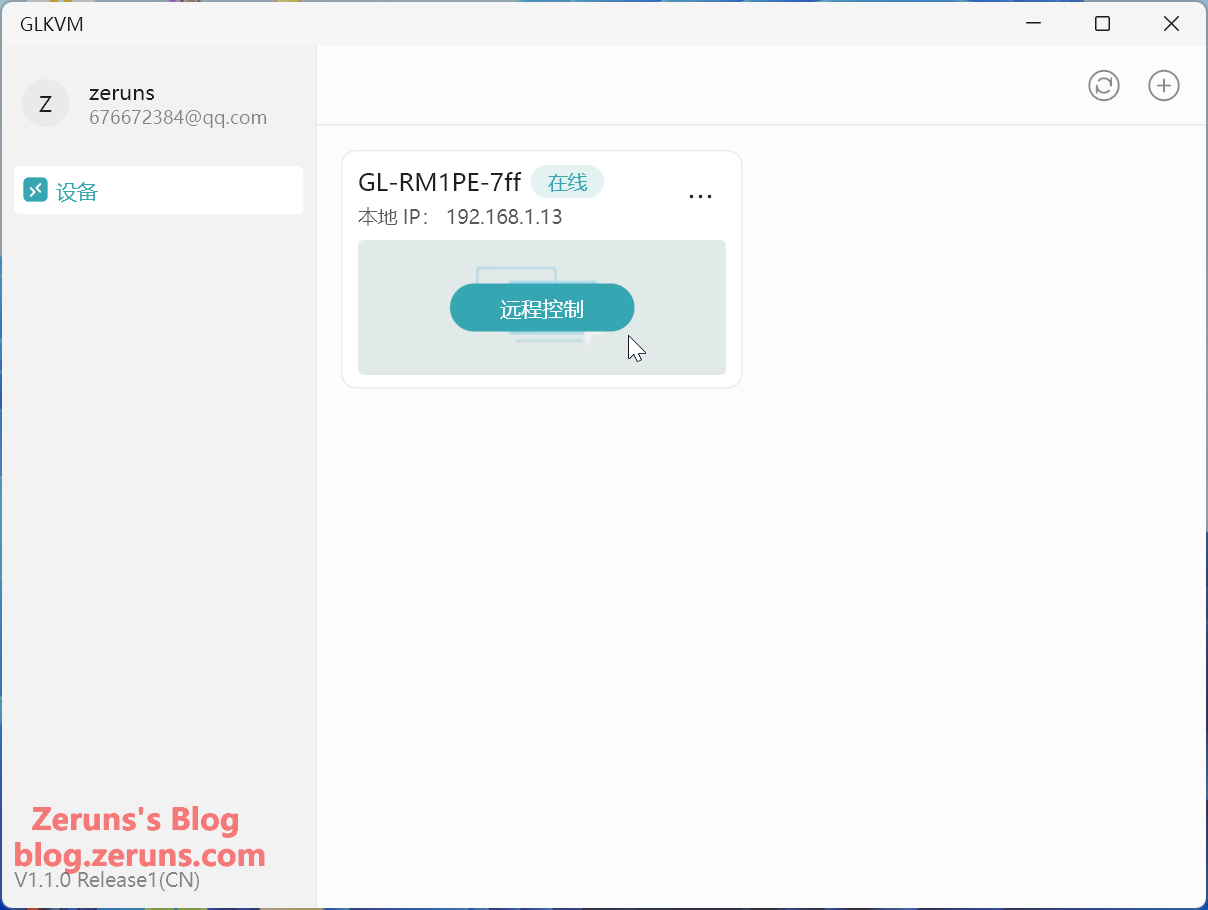
クライアントアプリのスクリーンショット。外出先でもクライアントアプリを使い、パブリックIPアドレスがなくてもリモート操作が可能です。
FGB-01 手指ロボット
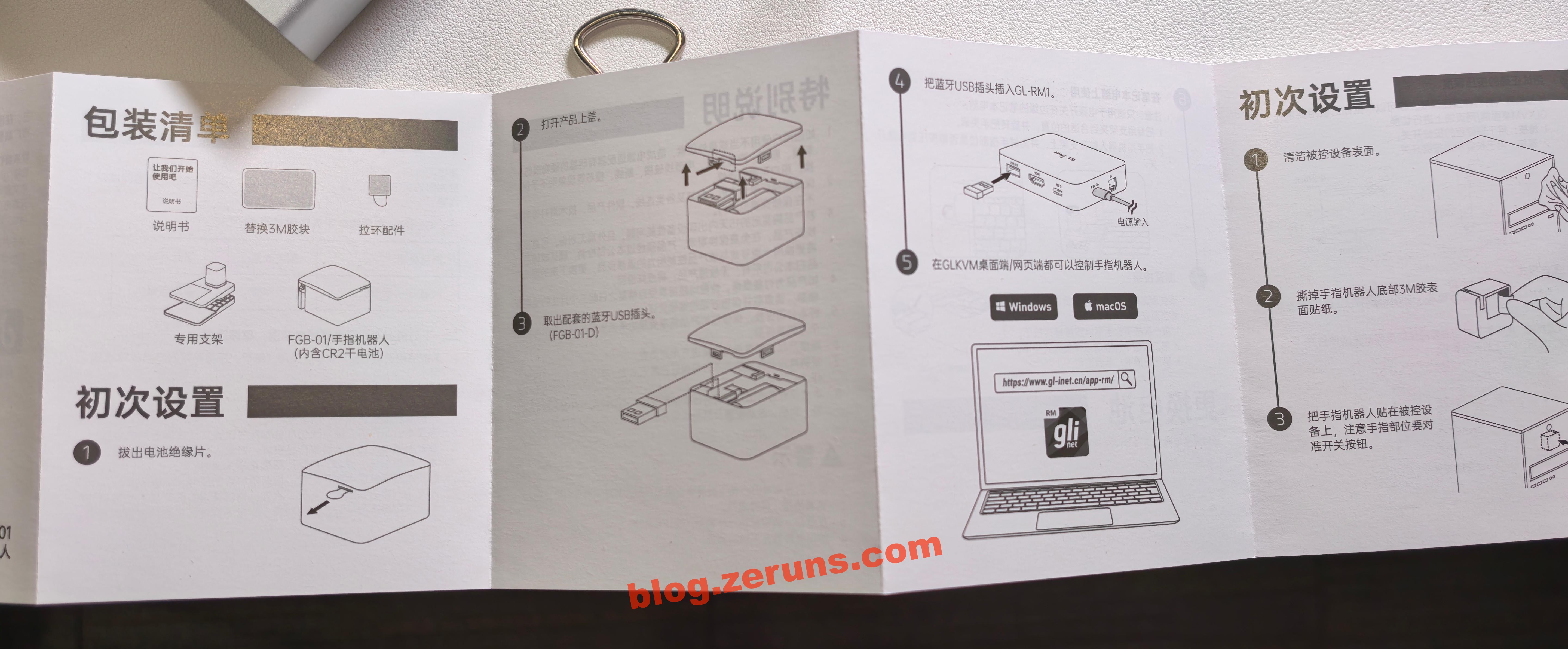
手指ロボットの電池からプラスチック製の絶縁シートを取り外すと、正常に動作します。手指ロボットの蓋を開けると、USBブルートゥースレシーバーが取り出せます。このレシーバーをGL-RM1PEのUSB-Aポートに挿入すれば、「外部デバイス」メニューから手指ロボットを制御し、ボタンを押す操作が可能になります。
手指ロボットはCR2電池で駆動(3V)。充電式のCR2リチウムイオン電池に交換することも可能です。

次に、指型ロボットを制御対象の機器に貼り付け、そのメカニカルアームが押下時に物理的な電源ボタンに接触できるようにします。これにより、機器の電源を制御可能になります。


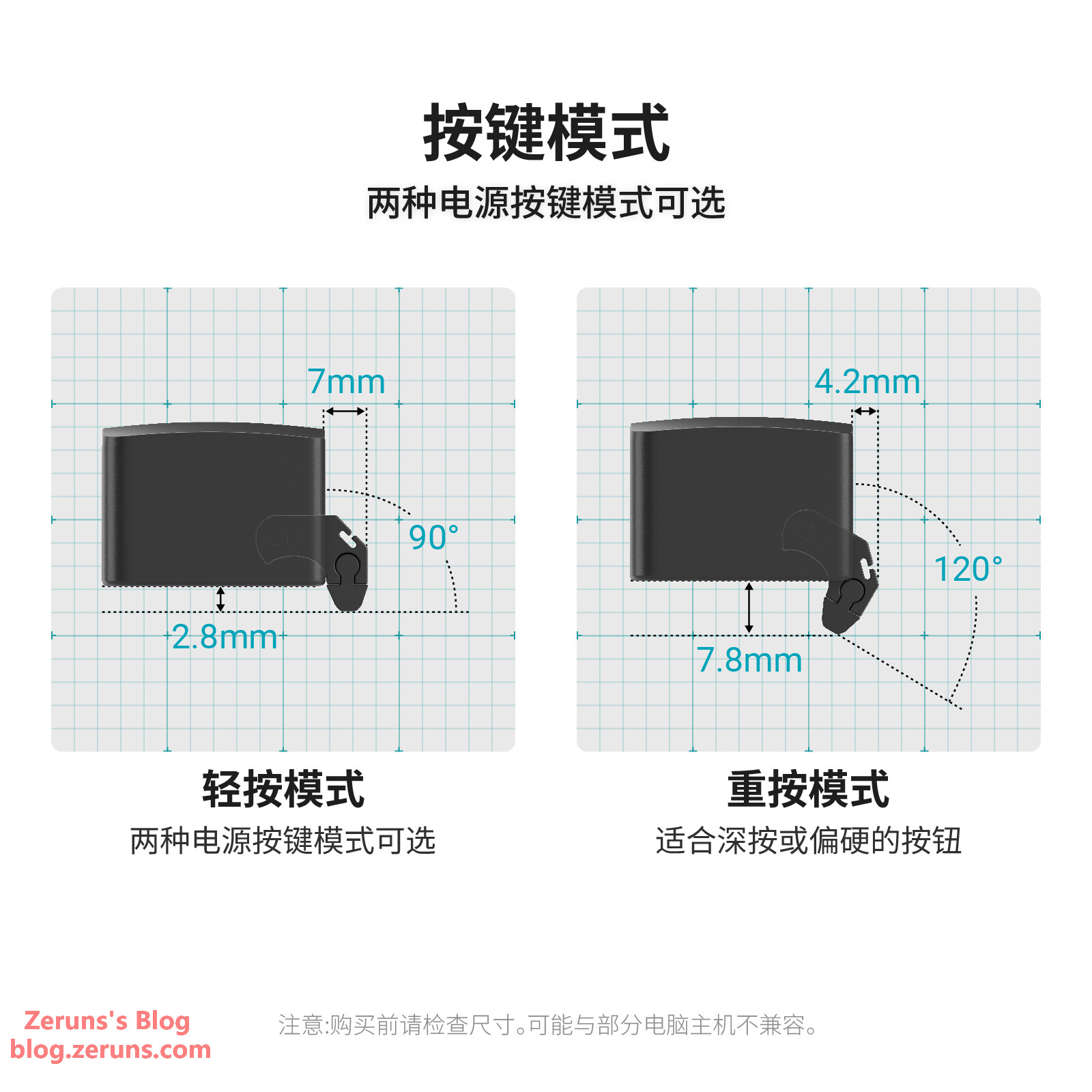
押下モードには「強押し」と「軽押し」の2種類があり、押し込む深さが異なり、さまざまなタイプのボタンに対応できます。
また、指型ロボット内部にあるテストボタン(上蓋を取り外すと見える)を使って、好みの押し込みレベルを調整することも可能です。
分解
GL-RM1PE
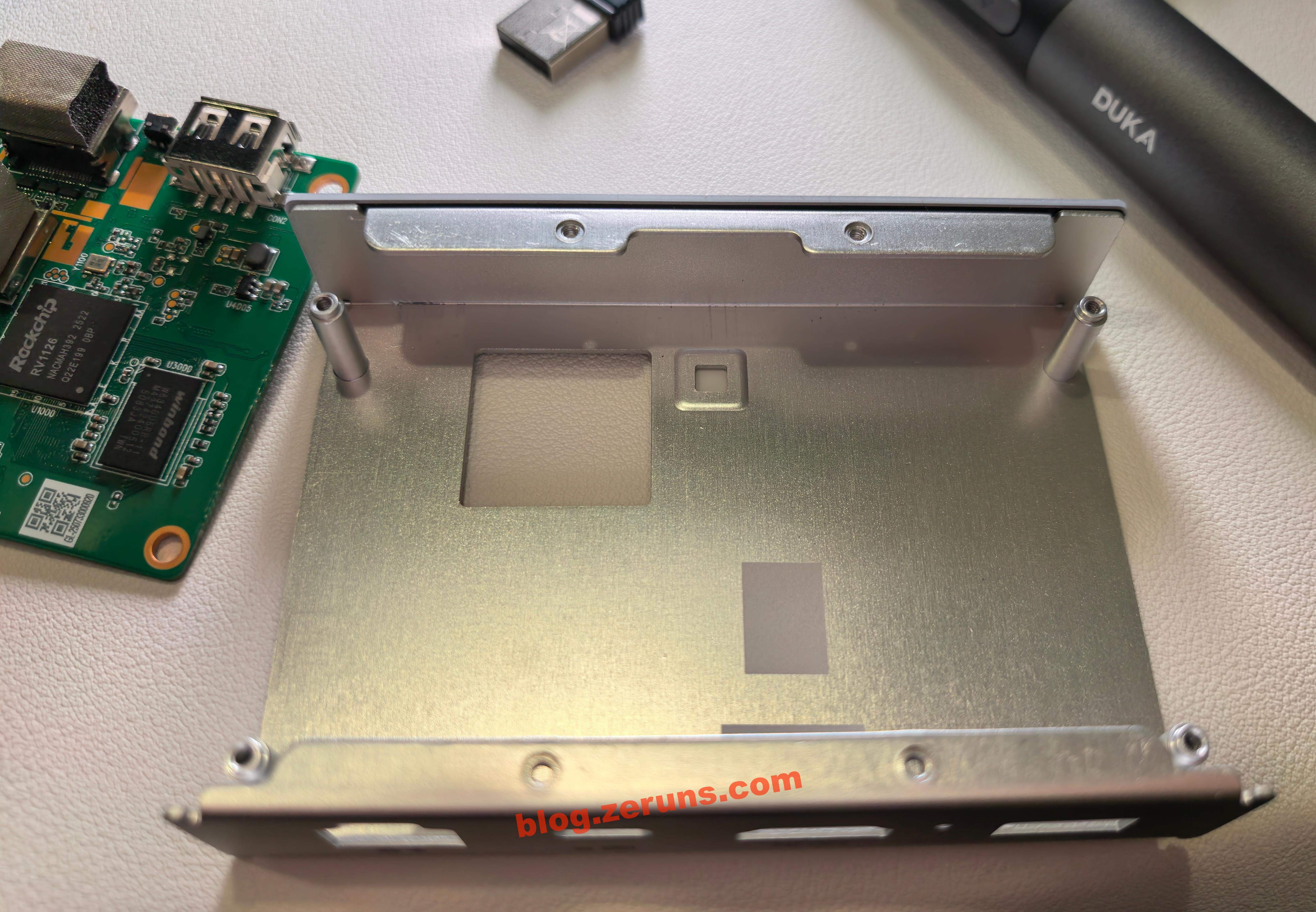
滑り止めパッドの下にある4本のネジを外すと、基板と内部のアルミニウムフレームを取り出せます。

アルミニウムフレームの裏面。トランス用の窓が開けられています。

基板上のネジを外して、回路基板を取り外します。
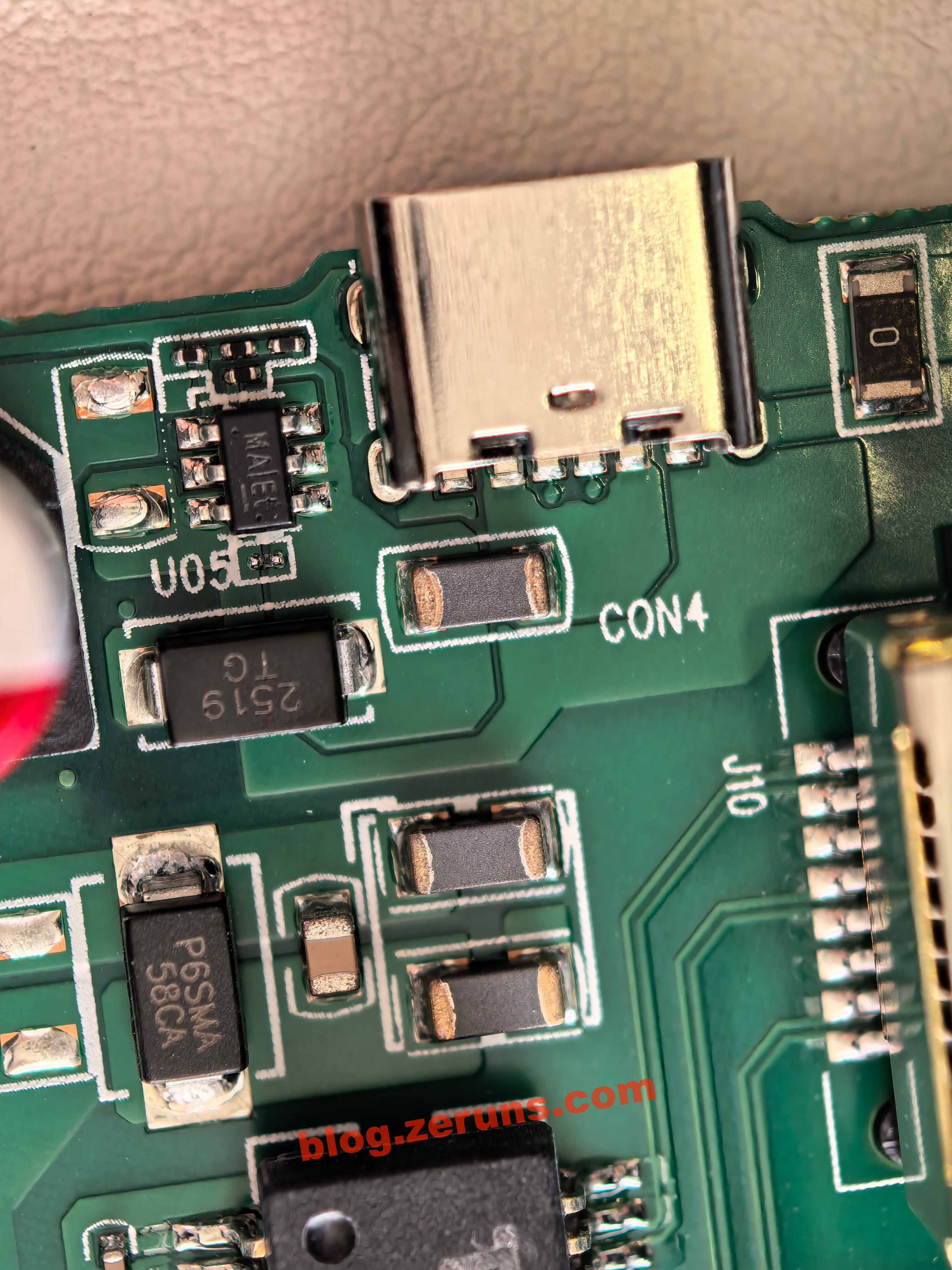
基板表側。このPCBのビアは樹脂で封止されており、一般的な油墨充填ビアより高コストな製法です。
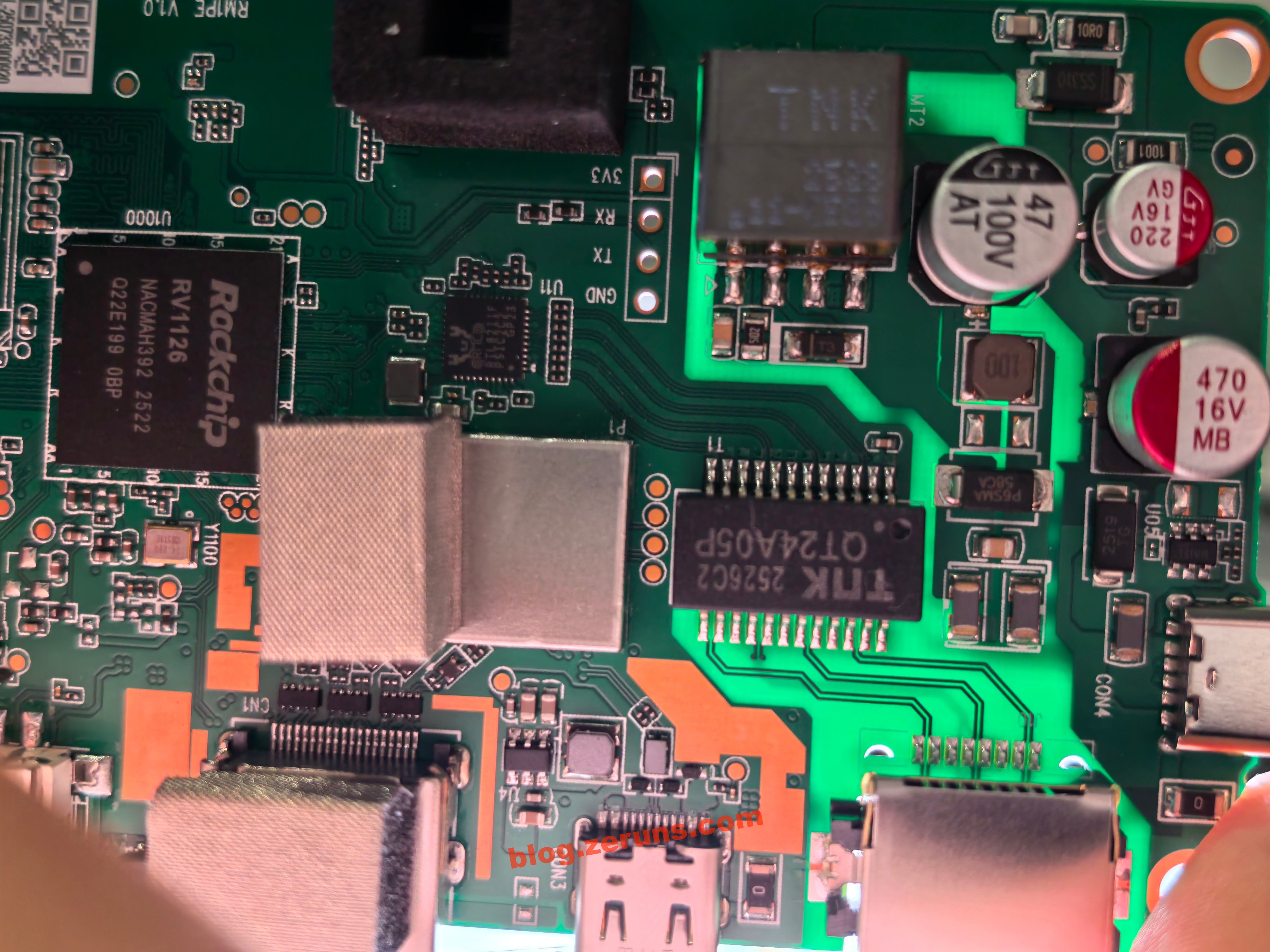
ネットワークポート下の「QT24A05P」は、訊康科技(TNK)が提供する単一ポート千兆PoE対応ネットワークトランスです。
その下にもう一つTNK製のトランスがあり、回路を分析すると、PoE給電用のフライバック電源トランスと推測されます。
右側のプロセッサの隣には「W634GU6RB-11」という型番のチップがあり、これは華邦電子(Winbond)の4Gbit(512MByte)DDR3Lメモリチップです。基板裏面にも同じ型番のチップが1つあり、合計で1GBのメモリ容量です。
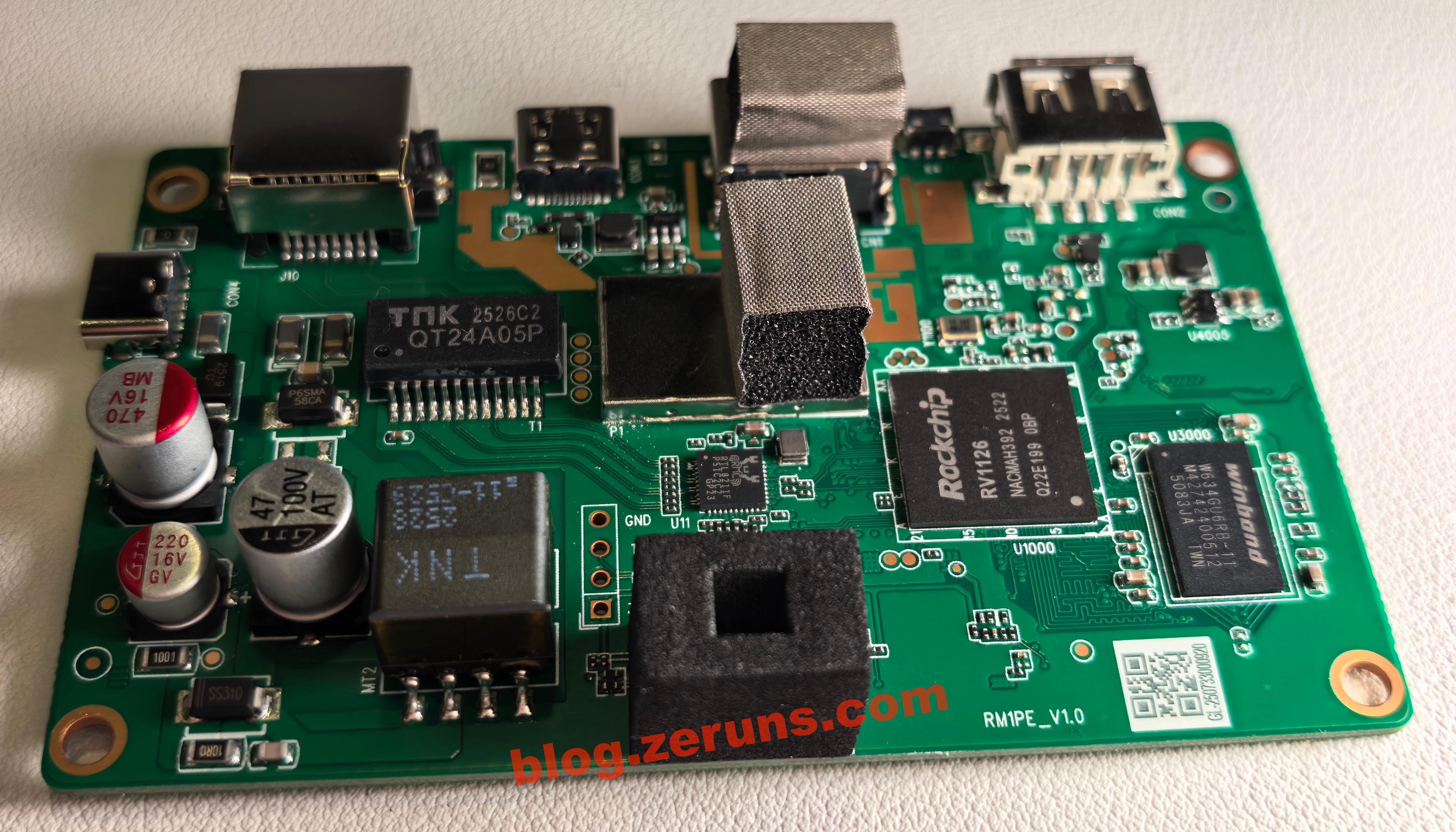
HDMI端子横のシールドカバーを外すと、
カバーの右下にあるチップはRockchip(瑞芯微)の「RV1126」で、四核ARM Cortex-A7+RISC-V MCUを搭載し、2.0TOPSのNPU、14M ISPを備え、4K H.264/H.265の動画エンコード・デコードをサポートしています。
シールドカバー下のチップはRealtek(瑞昱)の「RTL8211F」で、千兆イーサネットPHYトランシーバチップです。
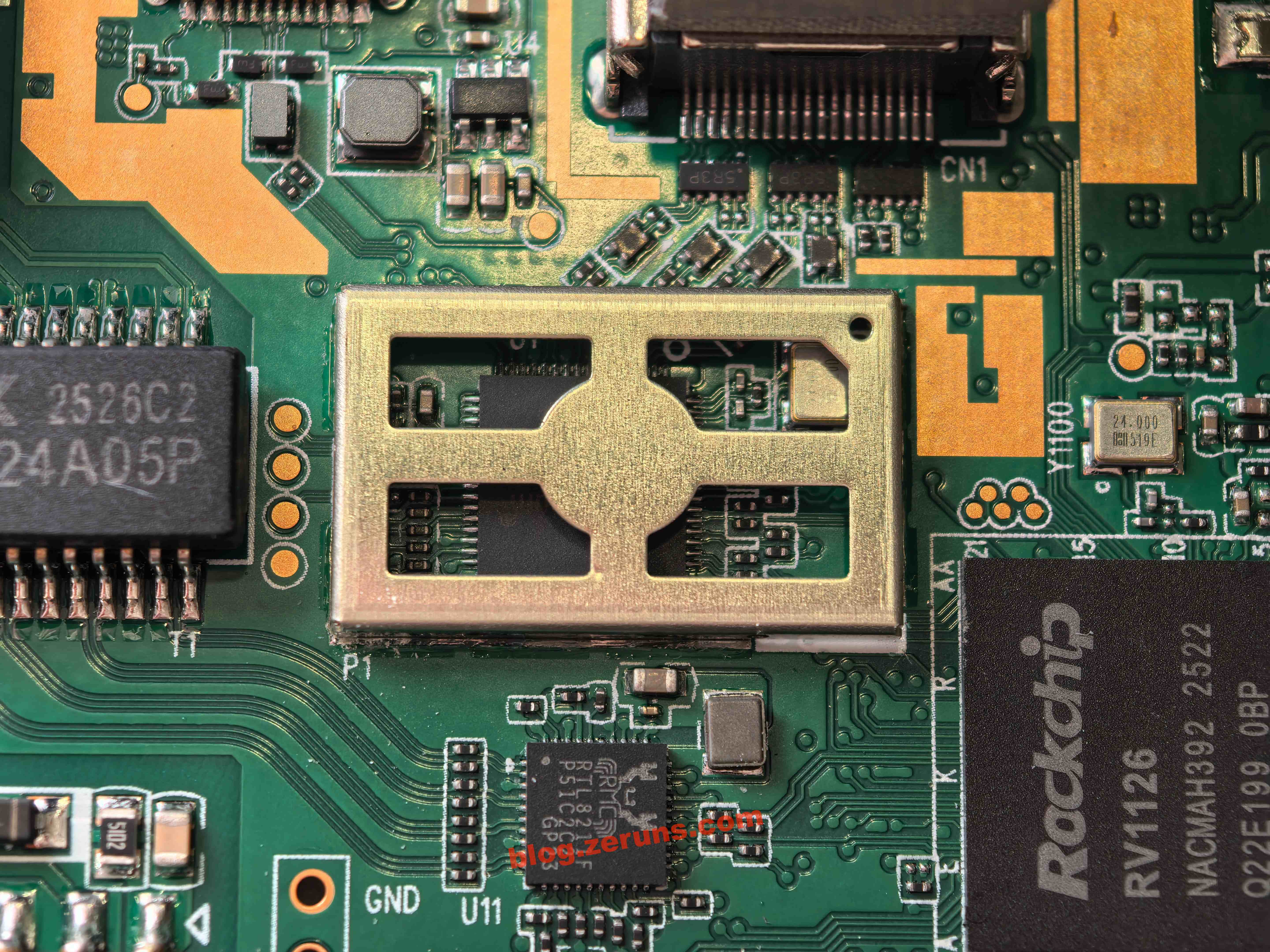
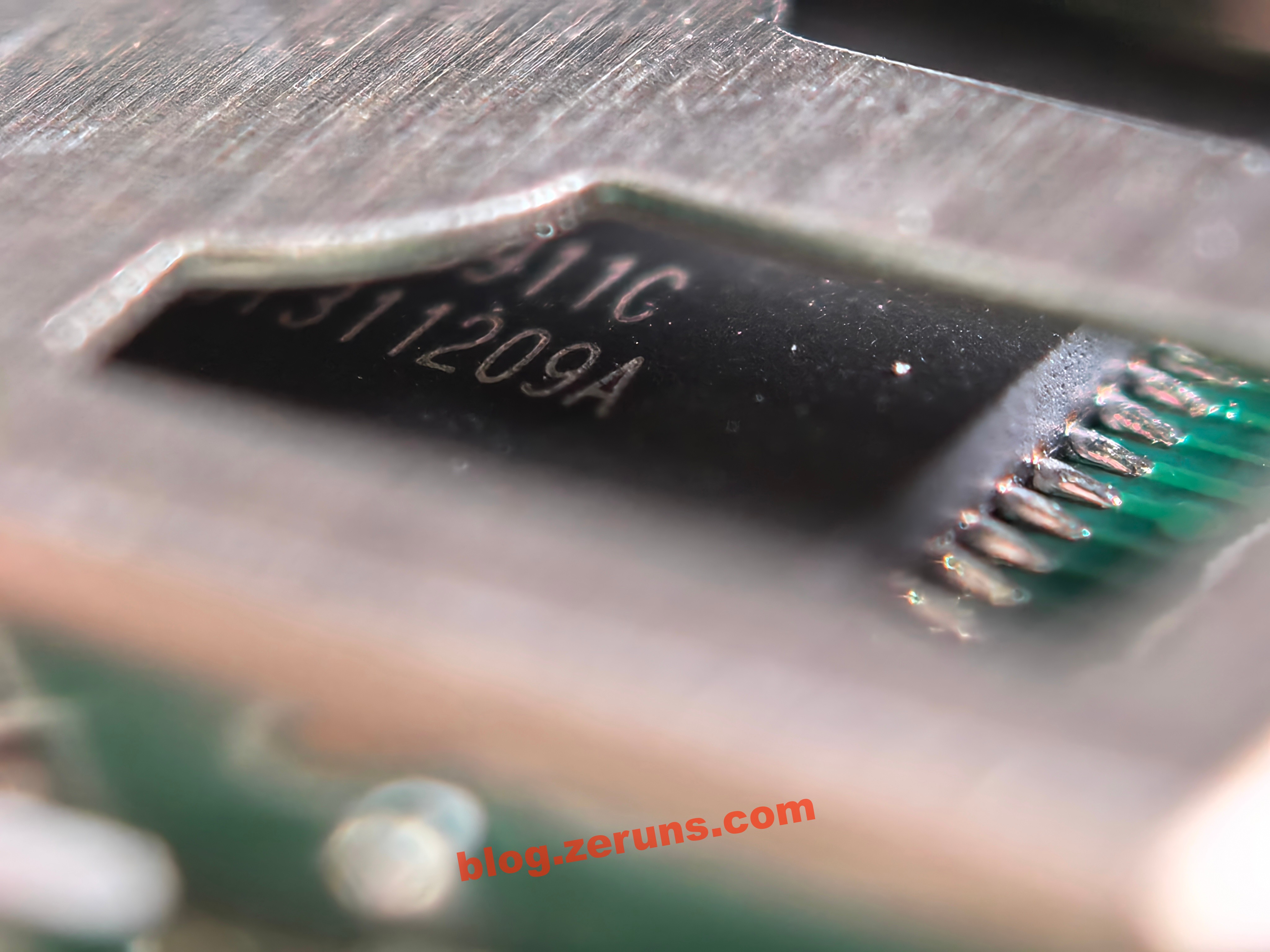
シールド内部のチップは型番LT6911Cで、龍迅半導体(Lontium)のHDMIからMIPI/LVDS/CSIへの変換チップです。HDMI1.4に対応し、高度なオーディオ処理機能と柔軟な制御インターフェースを備えています。
基板裏面。
左側には2つの整流ブリッジがあり、おそらくPoE給電回路用です。右上角の「TME7350」という型番のチップはTollsemi(拓爾微)の標準PoE受電ICで、802.3af PoE対応、フライバックコンバータ内蔵。フライバックトランスは基板表側にあります。
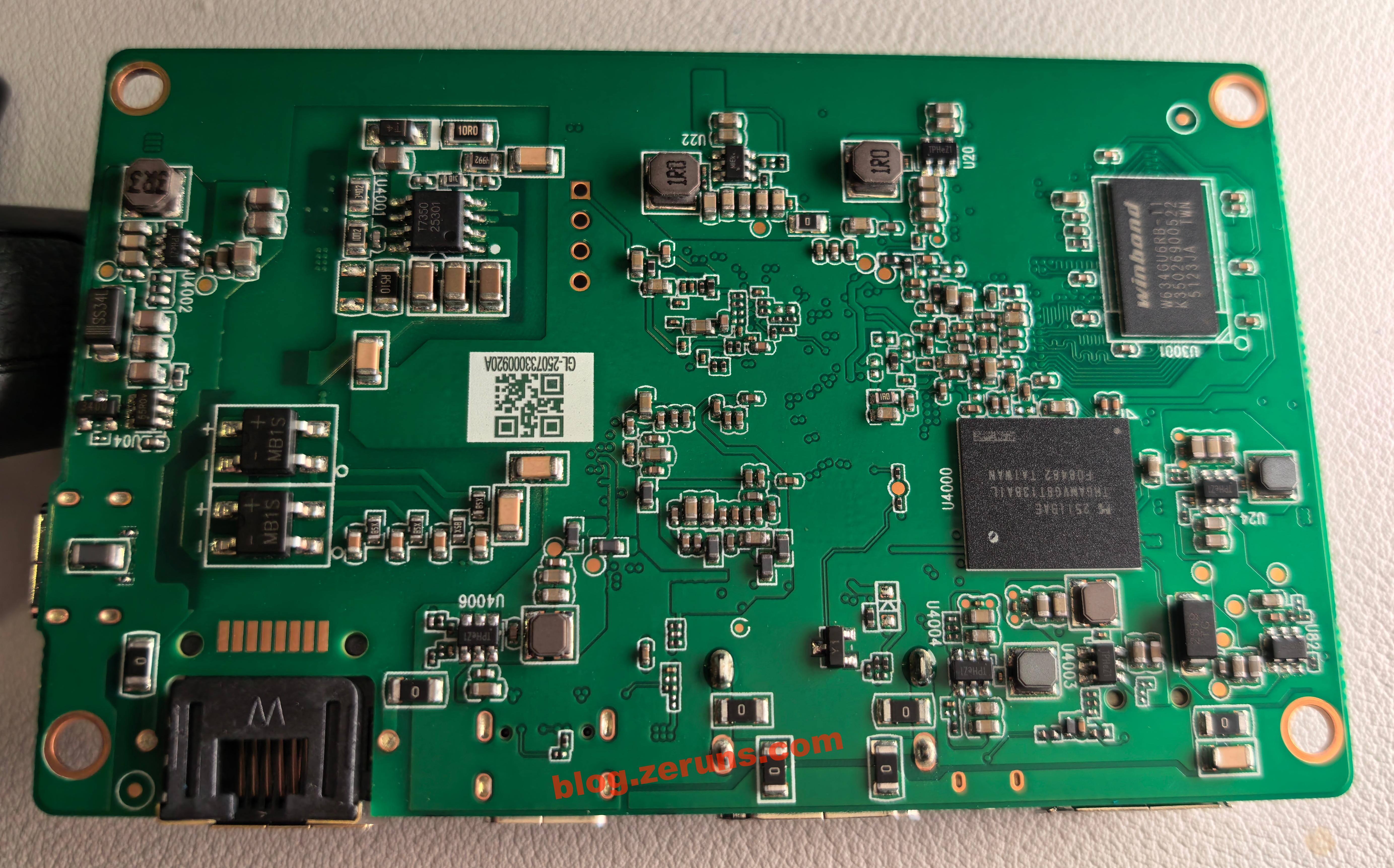
基板裏面には「THGAMVG8T13BAIL」という型番のチップがあり、これはKIOXIA(鎧侠)のe-MMC5.1フラッシュメモリで、容量は32GB、最大速度は400MB/sです。
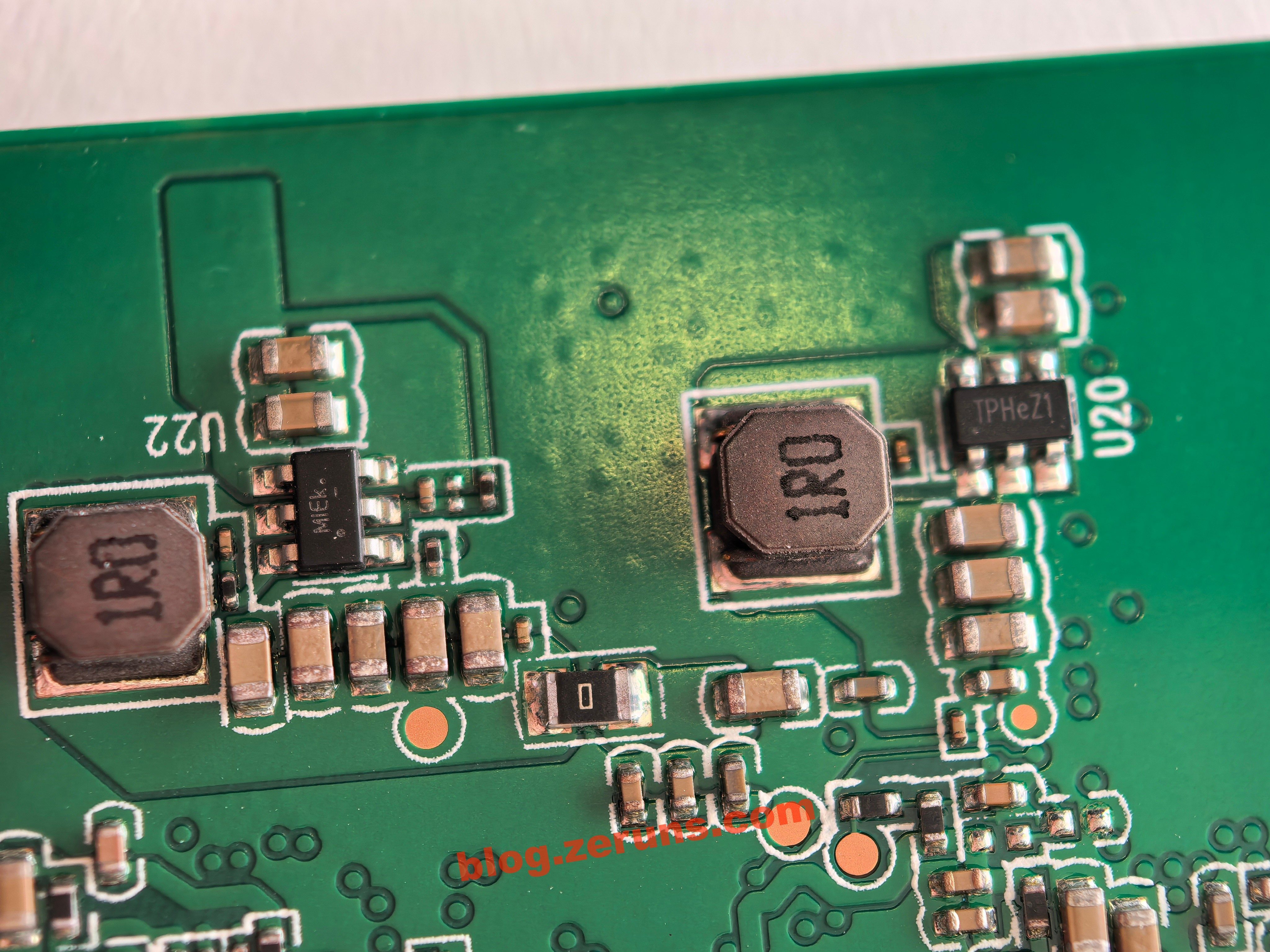
右側には「TPHeZ1」というマーキングのDCDC電源チップがあり、型番は不明で、資料が見つかりませんでした。

Type-C電源ポートの隣にはDCDC電源チップがあり、配線から判断するとブースト昇圧回路と思われます。
その他のDCDCチップ。
光を通して見ると内部層の配線も確認でき、このPCBは少なくとも4層構造であることがわかります。
FGB-01 指型ロボット
まずバッテリーを取り外し、ネジを外します。

バッテリーのコネクタを抜き、指型ロボットの基板を取り外します。
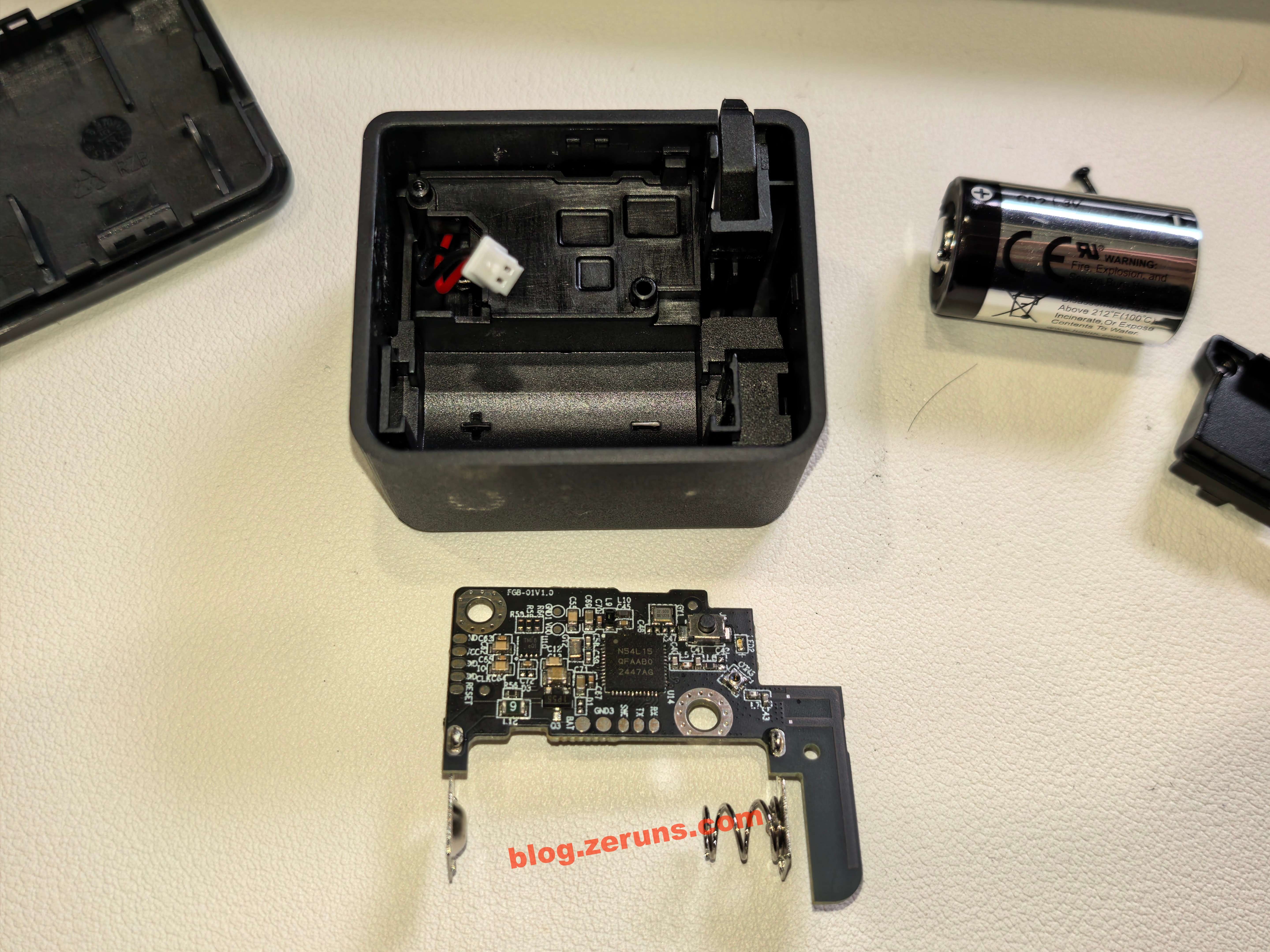
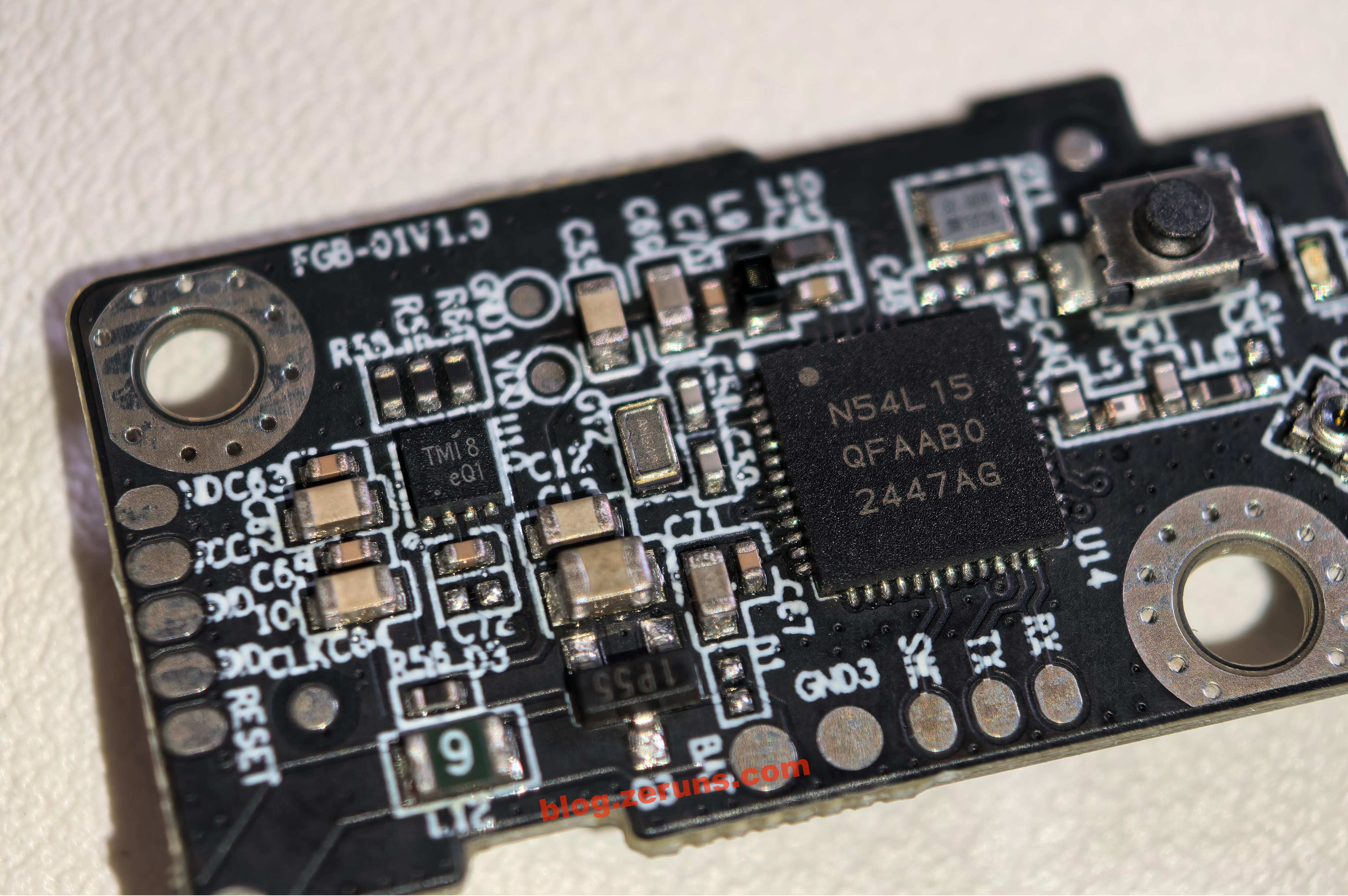
基板裏面。
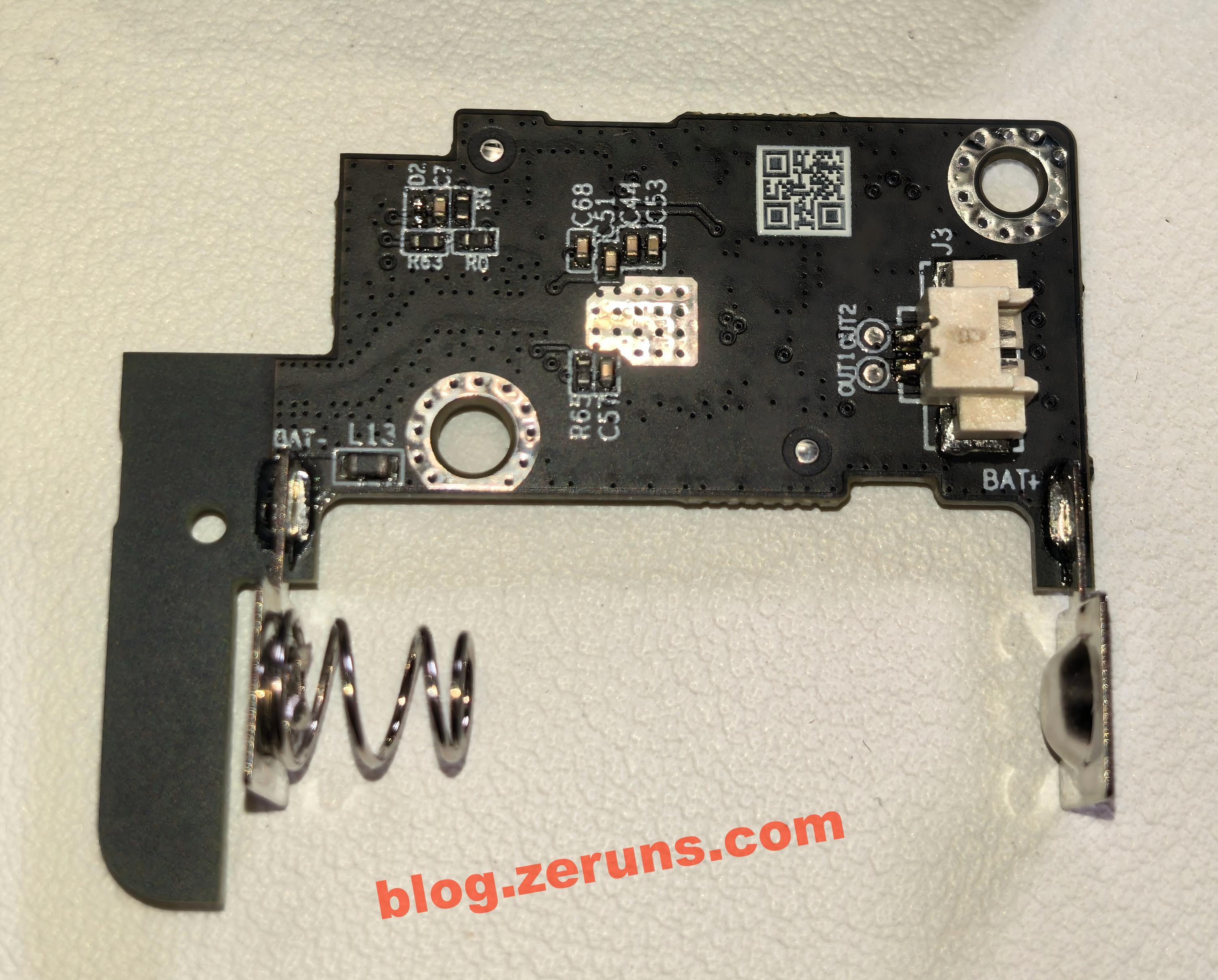
メインコントローラチップの型番は「nRF54L15」で、Nordic Semiconductor(ノーディックセミコンダクター)が提供する超低消費電力マルチプロトコル無線SoCです。22nmプロセスを採用し、128MHzのArm Cortex-M33プロセッサとRISC-Vコプロセッサを統合。Bluetooth 5.4/6.0、Thread、Matterなどのプロトコルをサポートしています。1.5MBのNVMと256KBのRAMを搭載し、無線性能は最大+8dBmの送信出力と-98dBmの受信感度。PSAレベル3のセキュリティ認証と超低消費電力設計を備え、スマートホームや産業用IoTなどの用途に適しています。
左側には「TMI8」というマーキングのチップがあり、おそらくブラシ付きDCモータードライバチップで、型番はTMI8870DまたはTMI8180Dと推測されます。
発熱状況のサーモグラフィー
優利德UTi261Mサーモグラフィーカメラの開封レビューと撮影効果の紹介:https://blog.zeruns.com/archives/798.html
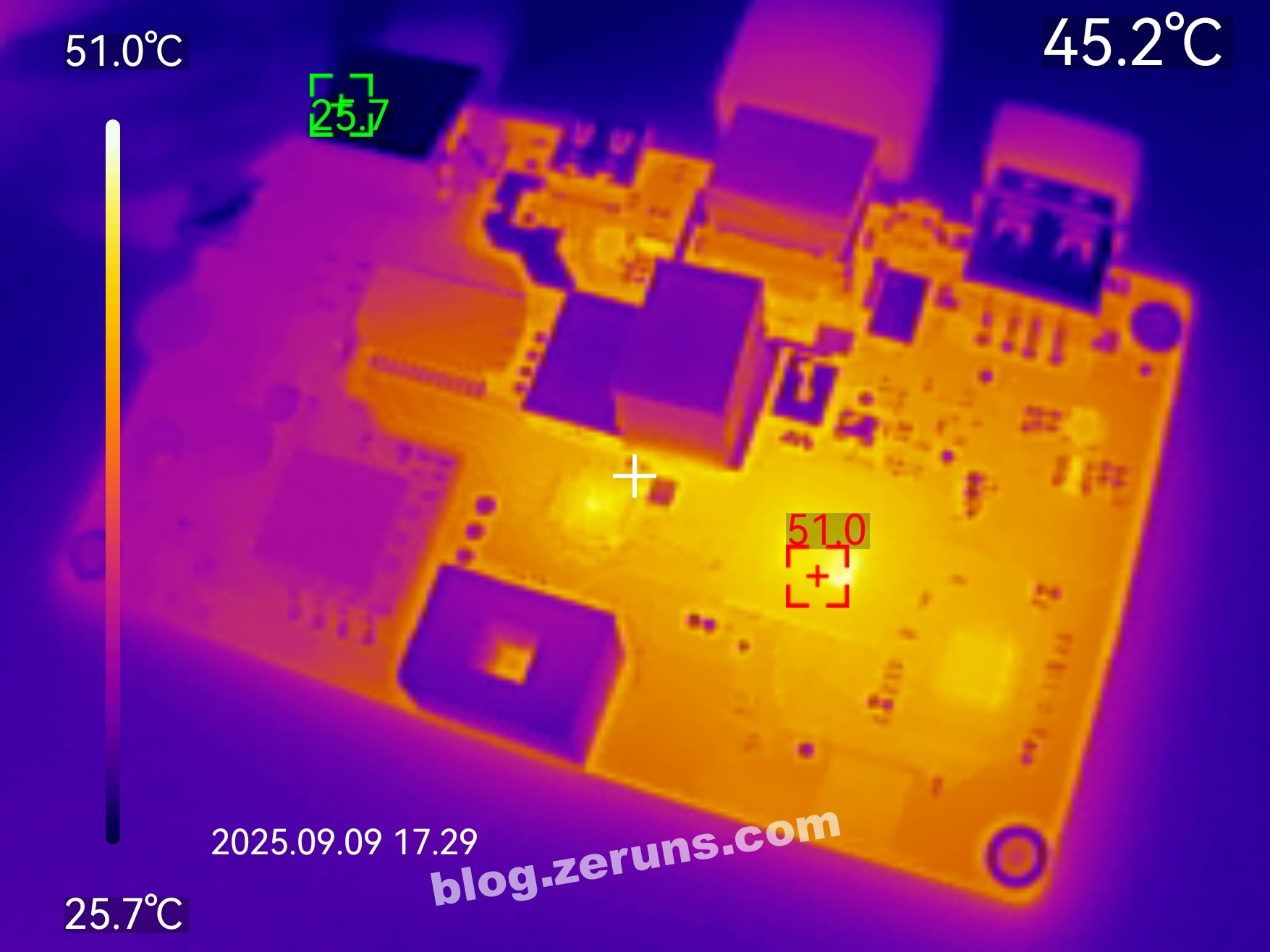
HDMIを接続して数分間動作させた後の基板表側のサーモ画像。室温は約26℃で、プロセッサの温度は約51℃です。
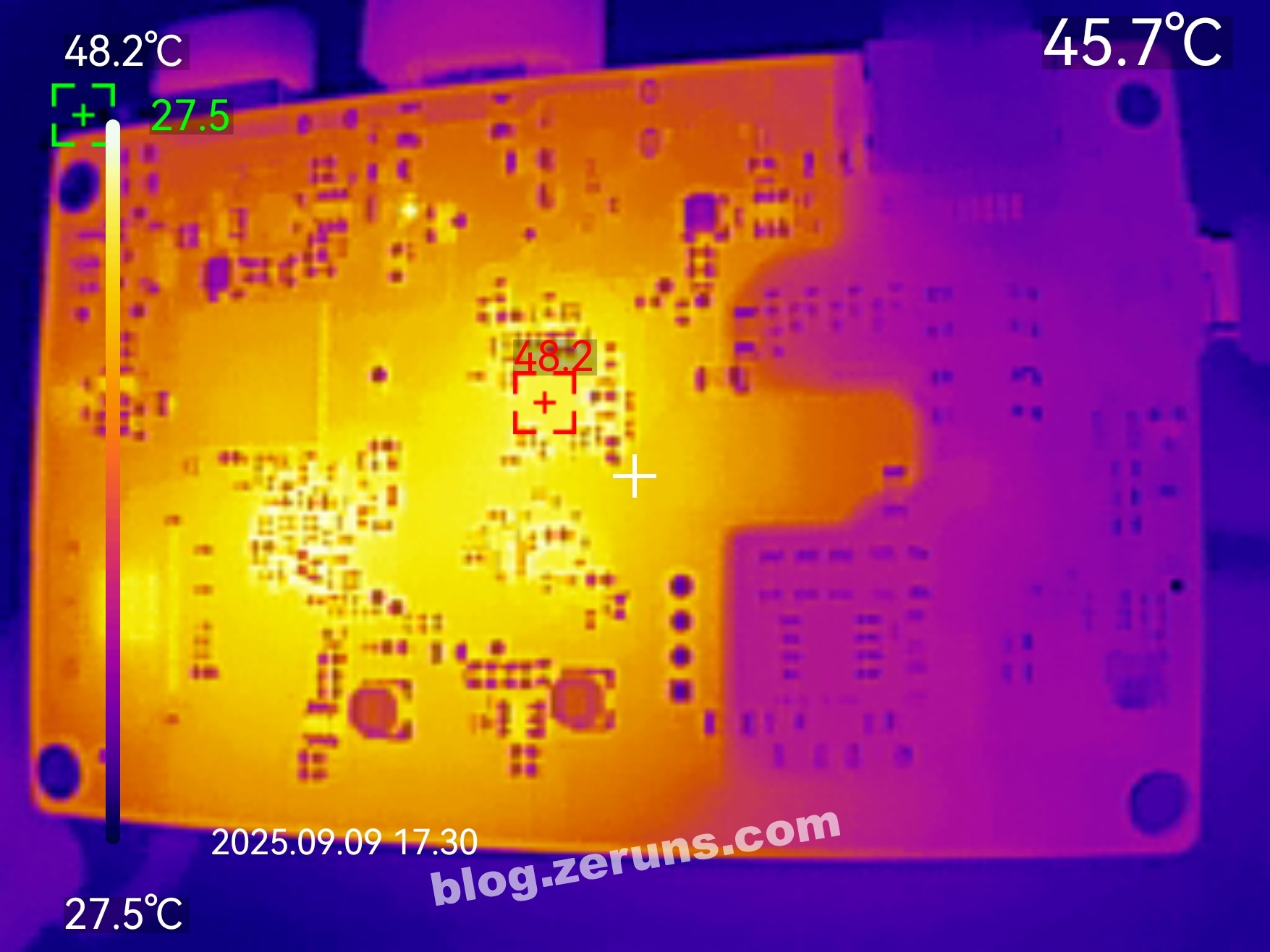
基板裏側のサーモ画像。最高温度はHDMI変換チップの底部で、約48℃です。
おすすめ記事
- 高コスパで安いVPS/クラウドサーバーの紹介:https://blog.zeruns.com/archives/383.html
- マインクラフトサーバーの構築方法:https://blog.zeruns.com/tag/mc/
- NanoKVM 開封レビューと分解:https://blog.zeruns.com/archives/840.html
- 机械革命Code10AIノートPC(Ultra7-255H) 開封レビューと分解:https://blog.zeruns.com/archives/895.html
- 跨境EC独立サイトの構築方法、WordPressで海外向けサイトを作るガイド:https://blog.zeruns.com/archives/889.html