https://oshwhub.com/zeruns/ji-yu-stm32-de-buck-boost-xing-shu-zi-dian-yuan Воссоздаю и изучаю данный проект. В части кода PID в нём присутствуют три режима: BUCK, BOOST и MIX. Однако я обнаружил, что операция IErr1 = IErr0; (обновление предыдущей ошибки в ПИД-регуляторе тока) выполняется только в режиме MIX.
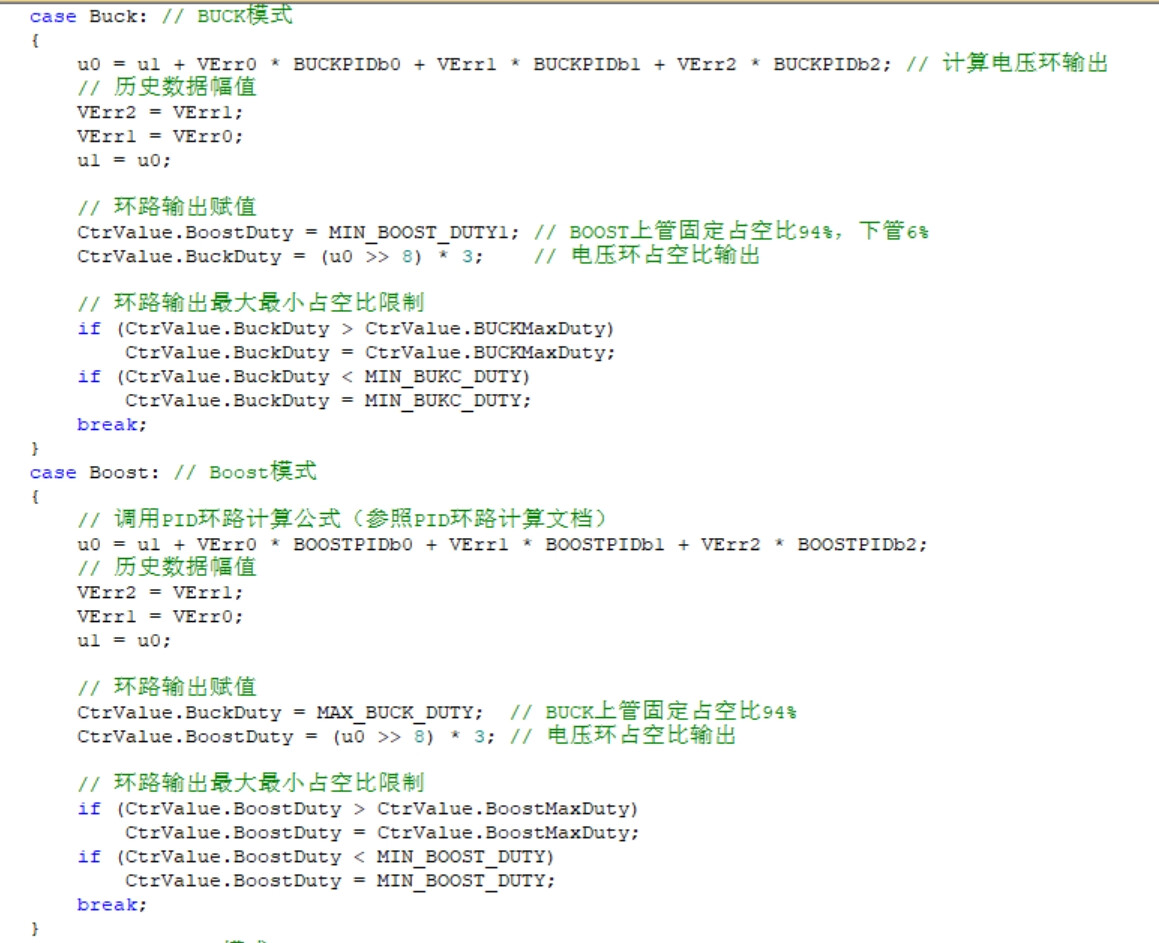
(Фрагменты кода режимов BUCK и BOOST — строка «// 历史数据幅值» не содержит IErr1 = IErr0;)
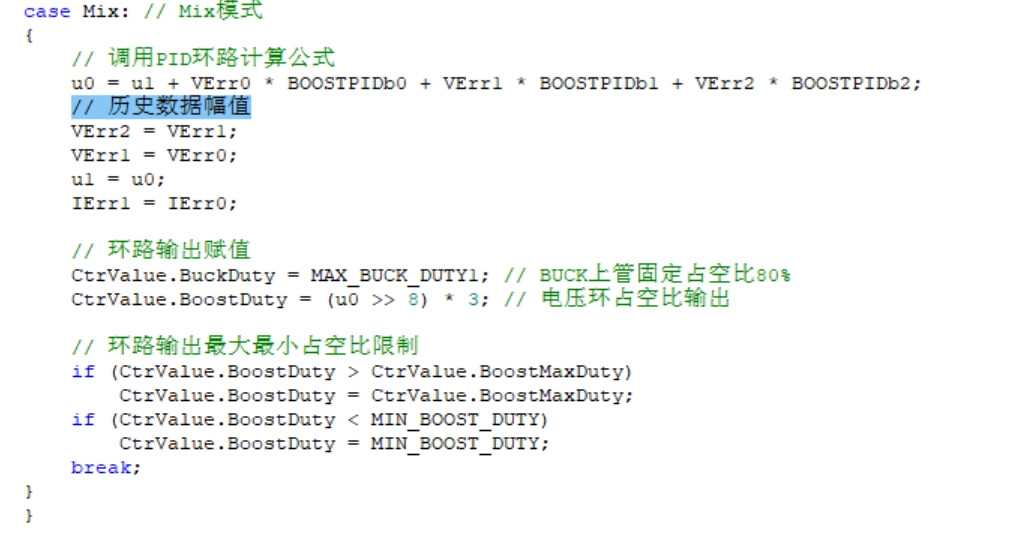
Фрагмент кода режима MIX — в комментарии «// 历史数据幅值» присутствует IErr1 = IErr0;. Не могу понять, почему обновление предыдущей ошибки в контуре тока выполняется только в режиме MIX.