Эта статья переведена из прикладного технического документа TI (ZHCA710 – Jun. 2017)
Авторы: Wiky Liao / Kevin Zhang
Ссылка для скачивания PDF-документа: https://www.123865.com/s/2Y9Djv-1uTdH
Аннотация
Печатные катушки Роговского отличаются высокой скоростью отклика, отличной линейностью и низкой стоимостью, что привело к их широкому применению в приложениях с переменным током большой амплитуды, таких как управление переменно-токовыми двигателями, эскалаторы, воздушные линии и кабели. Поскольку выходной сигнал катушки Роговского является дифференциалом исходного тока, необходимо разработать интегрирующую схему. В этой статье подробно описаны принцип работы и ключевые моменты проектирования печатных катушек Роговского, а также представлена высокопроизводительная интегрирующая схема на основе операционного усилителя TI OPA2333, которая поможет заказчикам быстро разработать решение для измерения тока с использованием печатных катушек Роговского, соответствующее требованиям их приложений.
1 Катушка РоговскогоКатушка
1.1 Введение в катушку Роговского
Катушка Роговского — это бесконтактный датчик тока, который в основном делится на два класса: гибкий и жесткий, причем печатная катушка Роговского относится к жесткому типу. Ее структурные особенности заключаются в том, что провод равномерно намотан на немагнитное кольцевое основание, образуя кольцевую катушку, а измеряемый ток проходит через центр катушки, как показано на Figure 1.
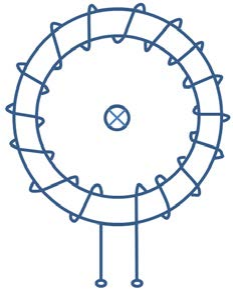
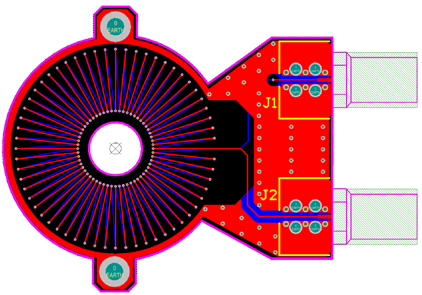
Figure 1 На левом рисунке показана структурная схема катушки Роговского, на правом — PCB Layout катушки Роговского
1.2 Принцип работы катушки Роговского
Предположим, бесконечно длинный провод с током проходит перпендикулярно через центр катушки Роговского, сила тока в проводе равна I. Внутренний диаметр катушки равен a, наружный диаметр — b, толщина платы — h, магнитная проницаемость проводника печатной платы — μ. Как показано на Figure 2.
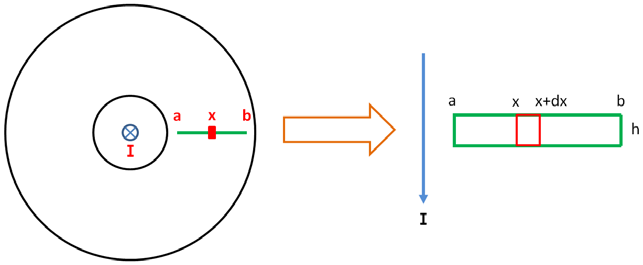
Figure 2 Аналитическая модель катушки Роговского, левый рисунок — вид сверху, правый рисунок — разрез
Согласно закону Био-Савара, магнитная индукция в точке x:
Проводники верхнего и нижнего слоев соединены через переходные отверстия (виа), образуя 1 виток, магнитный поток, создаваемый каждым витком:
Согласно закону Ленца, напряжение, индуцируемое в катушке с N витками:
В формуле (3) M — коэффициент взаимной индукции.
Из формулы (3) следует, что выход катушки Роговского — это напряжение, которое имеет дифференциальную зависимость с измеряемым током, поэтому катушка Роговского применима только для измерения переменного тока, и в использовании необходимо сочетать с интегратором.
1.3 Ключевые моменты проектирования печатной катушки Роговского
1.3.1 Ограничение числа витков
Основным параметром катушки Роговского является коэффициент взаимной индукции M, его значение в основном зависит от числа витков, толщины платы, внутреннего и наружного диаметров катушки. При этом, из-за ограничений размера переходных отверстий (виа) печатной платы и технологических возможностей производства, фактическое число витков не может быть бесконечно большим и имеет определенные ограничения. Модель расчета числа витков показана на Figure 3.
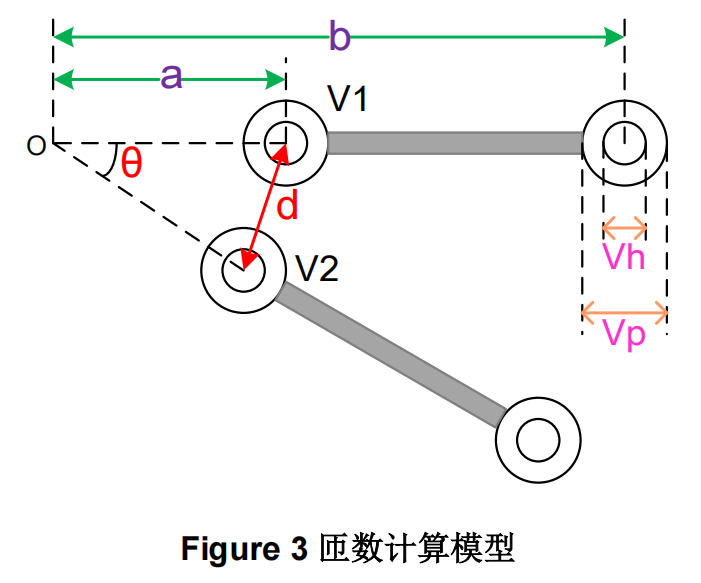
Расстояние между переходными отверстиями V1 и V2:
Из-за ограничений технологического уровня, расстояние между этими двумя соседними переходными отверстиями должно быть не менее чем в 3 раза больше разницы между диаметром контактной площадки и диаметром переходного отверстия, то есть:
где V_p — диаметр контактной площадки переходного отверстия, V_h — диаметр переходного отверстия.
Из формул (4) и (5) можно получить угол между двумя соединенными переходными отверстиями:
Поэтому максимальное число витков печатной катушки Роговского:
Как правило, толщина платы также определяет минимальный размер переходных отверстий, поэтому перед проектированием катушки лучше уточнить у производителя печатных плат.
1.3.2 Рациональное использование пространства
Печатная катушка Роговского обычно имеет радиальную трассировку, в результате чего между витками вблизи наружного кольца будет большой зазор. Поэтому между большими витками можно добавить маленькие витки, что позволит увеличить коэффициент взаимной индукции катушки при неизменных габаритах платы, как показано на Figure 4. Предположим, что внутренний диаметр маленьких витков равен c, наружный диаметр — d, тогда коэффициент взаимной индукции катушки:
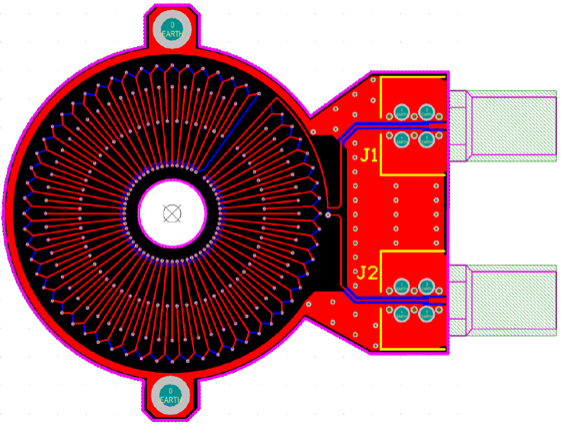
Figure 4 Катушка Роговского с добавленными маленькими витками
При фиксированных габаритах платы, если требуется очень большой коэффициент взаимной индукции, можно рассмотреть возможность последовательного соединения нескольких печатных катушек Роговского «голова в хвост», то есть выход J2 на Figure 4 подключить к входу J1 следующей печатной катушки, чтобы реализовать суммирование сигналов.
2 Проектирование интегральной схемы
2.1 Недостатки идеальной интегральной схемы и ее улучшение
Поскольку выходное напряжение катушки Роговского является дифференциалом измеряемого сигнала тока, если в последующем каскаде нет интегральной схемы, то даже незначительная высокочастотная составляющая тока индуцирует на выходе катушки высокое напряжение, которое заглушает сигнал основной гармоники. Поэтому в последующем каскаде требуется интегральная схема для восстановления сигнала. Идеальная интегральная схема показана на Figure 5.
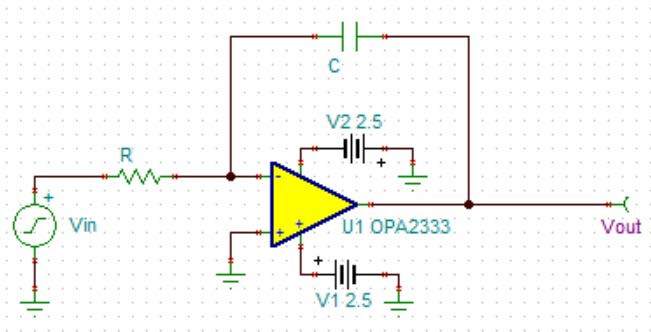
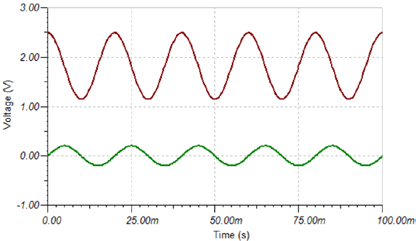
Figure 5 На левом рисунке показана принципиальная схема идеального интегратора, на правом — форма выходного напряжения интегратора
Когда смещение входного сигнала равно нулю, смещение выходного сигнала после интегрирования также должно быть нулем. Однако как видно из рисунка выше, смещение выходного напряжения интегратора не равно нулю, и форма сигнала смещена к напряжению питания. В реальной работе операционного усилителя ситуация еще хуже, форма сигнала будет обрезана у напряжения питания, вызывая искажения насыщения или отсечки. Основная причина заключается в том, что современные операционные усилители не являются идеальными и имеют固有的失调电压 offset. Из-за отсутствия других контуров offset заряжает интегрирующий конденсатор, что в конечном итоге приводит к насыщению конденсатора и обрезке сигнала. Поэтому необходимо подключить параллельное сопротивление к интегрирующему конденсатору, чтобы создать разрядный контур и обеспечить стабильную работу схемы, как показано на Figure 6. После подключения параллельного сопротивления необходимо проанализировать интегральные характеристики схемы.
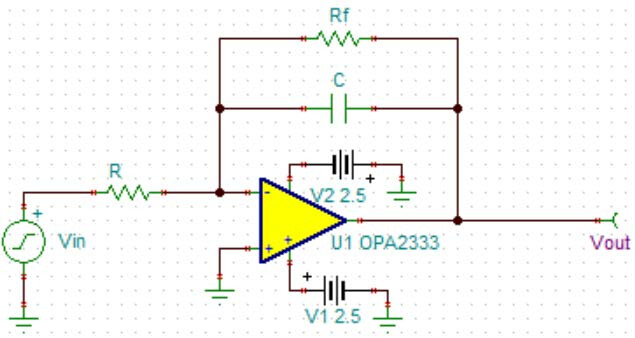
Figure 6 Анализ характеристик после подключения параллельного сопротивления к интегратору
На инвертирующем входе операционного усилителя составляем уравнение токов Кирхгофа:
Уравнение (9) является нелинейным однородным уравнением первого порядка, решая которое получаем:
где C_1 — постоянная. Предположим, что входной сигнал V_{in} = \cos(\omega t), тогда уравнение (10) можно упростить:
С точки зрения частотной области, коэффициент усиления схемы после подключения параллельного сопротивления:
Уравнения (11) и (12) передают две важные информации:
- Когда время t постепенно увеличивается, экспоненциальная часть выходного напряжения V_{out} C_1 e^{-\frac{t}{R_f C}} будет постепенно уменьшаться, в конечном итоге ею можно полностью пренебречь;
- Когда R_f \gg \frac{1}{\omega C}, \varphi \approx 0^\circ, и коэффициент усиления приближается к идеальному \frac{1}{\omega RC}, в этом случае можно считать, что выходное напряжение является инвертирующим интегралом входного сигнала.
На основе вышеприведенного анализа результаты моделирования интегральной схемы показаны на Figure 7. Зеленая кривая соответствует входному сигналу, красная — выходному. Выходной сигнал на начальном этапе из-за влияния экспоненциального множителя имеет колебания, но в конечном итоге стабилизируется, интегральный эффект очень хороший.
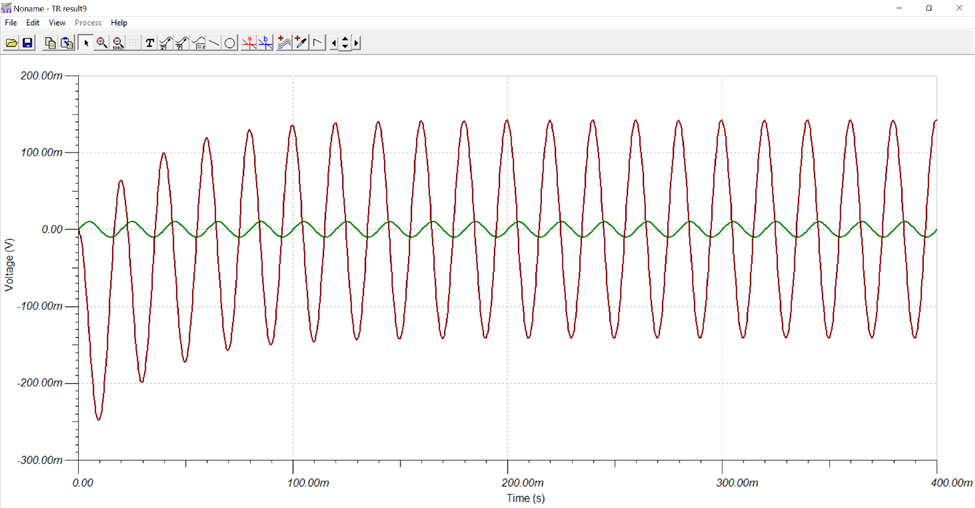
Figure 7 Осциллограммы моделирования интегральной схемы после подключения параллельного сопротивления
2.2 Выбор операционного усилителя для интегральной схемы
Для достижения хорошего интегрального эффекта обычно требуется выбирать обратное сопротивление Rf как можно большим, но не чем больше, тем лучше. Основная причина заключается в том, что интегральная схема для offset операционного усилителя является неинвертирующим усилителем, слишком большое обратное сопротивление Rf приведет к большому постоянному смещению на выходе, что ослабит способность подавления дрейфа интегратора. Поэтому операционный усилитель в интегральной схеме должен иметь очень маленькое значение offset, чтобы обеспечить как можно более низкий уровень постоянного напряжения на выходе. OPAx333 — это операционный усилитель с функцией Zero Drift, выпущенный компанией TI, внутри которого применяется метод цифровой калибровки, что значительно снижает offset и напряжение дрейфа, его максимальное значение offset составляет всего 10 мкВ, при этом дрейф составляет всего 0.05 мкВ/°C, что очень подходит для проектирования интегральных схем. На Figure 8 показано DC моделирование интегральной схемы на OPA2333, можно видеть, что при обратном сопротивлении в 1000 раз большем, чем интегрирующее сопротивление, выходное напряжение составляет всего 2.66 мВ, что говорит о очень хороших характеристиках. При этом максимальный статический ток OPAx333 составляет всего 25 мкА, что делает его маломощным высокопроизводительным операционным усилителем.
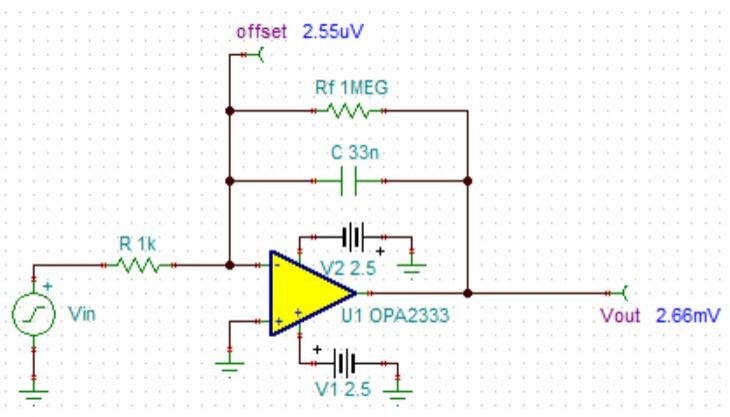
Figure 8 DC моделирование интегральной схемы на OPA2333
2.3 Проектирование интегральной схемы с однополярным питанием
Вышеупомянутая интегральная схема использует схему с двухполярным питанием, однако во многих приложениях клиентов поддерживается только однополярное питание, поэтому необходимо спроектировать такой тип интегральной схемы. Опираясь на структуру дифференциального операционного усилителя, спроектирована интегральная схема с однополярным питанием, как показано на Figure 9.
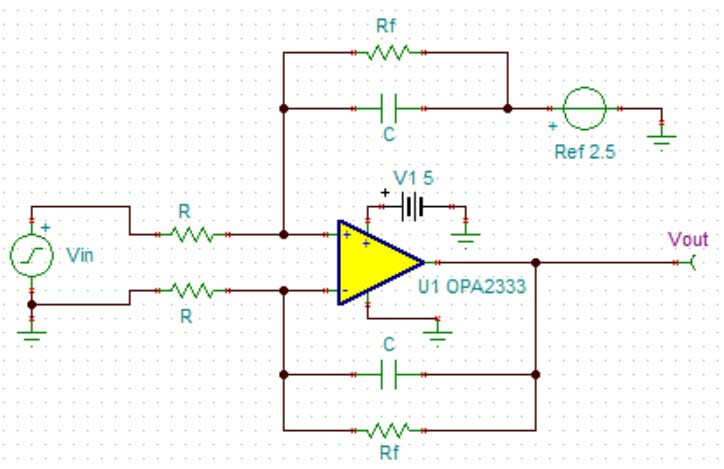
Figure 9 Интегральная схема с однополярным питанием
Аналогично вышеупомянутому методу анализа, если входное напряжение V_{in} = \cos(\omega t), то выходное напряжение:
Ключевое понимание уравнения (13):
- Характеристики выхода: выходное напряжение является неинвертирующим интегралом входного сигнала, при этом содержит постоянное смещение V_{ref};
- Проверка моделированием: осциллограммы выходного сигнала соответствуют Figure 10, где зеленая кривая — входной сигнал, красная кривая — выходной сигнал, интегральные характеристики системы проявляются хорошо.
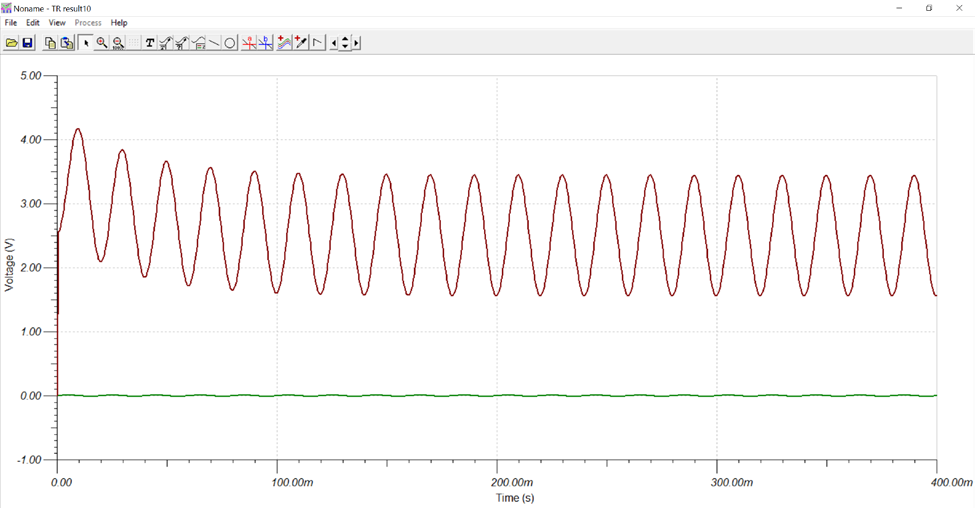
Figure 10 Осциллограммы моделирования интегральной схемы с однополярным питанием
2.4 Особенности высокопроизводительной интегральной схемы
2.4.1 Коррекция смещения
Из вышеприведенного анализа схемы известно, что напряжение смещения на выходе имеет определенную погрешность, для операционного усилителя OPAx333 оно составляет максимум несколько мВ (для менее качественных усилителей может достигать сотен мВ). Если к напряжению смещения на выходе предъявляются высокие требования, необходимо повторно скорректировать смещение, схема коррекции расположена в последующем каскаде после интегральной схемы, как показано на Figure 11. По результатам моделирования видно, что постоянное смещение на выходе Vout отличается от заданного значения Ref всего на 27 мкВ, эффект коррекции смещения очень хороший. При этом резисторы неинвертирующего усилителя R2 и R3 могут дополнительно формировать сигнал, чтобы выход достиг полного диапазона.
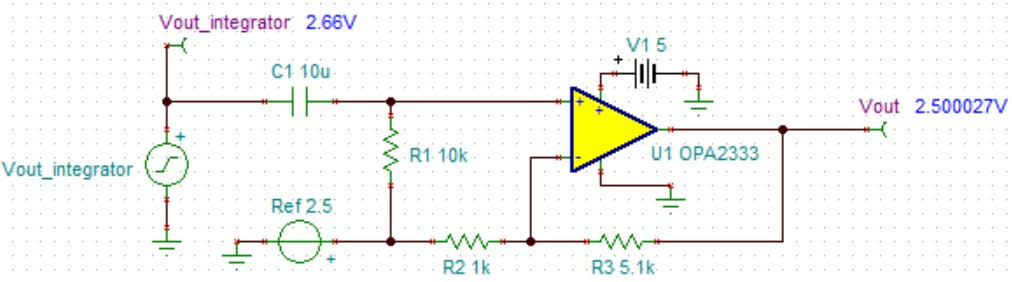
Figure 11 Схема коррекции смещения и результаты DC моделирования
2.4.2 Измерение высокочастотной составляющей неисправностей
В некоторых приложениях (например, AFCI) пользователи в основном фокусируются на высокочастотной составляющей неисправностей тока, чтобы в аварийной ситуации выполнить соответствующие действия (например, отключить цепь), в то время как ток нормальной работы в низкочастотной области не так важен, его даже можно игнорировать. Для таких приложений можно сначала установить фильтр верхних частот, чтобы отфильтровать низкочастотную составляющую. Затем добавить усилитель, чтобы усилить высокочастотную составляющую, гарантируя, что сигнал после интегрирования достаточен для мониторинга, прикладная схема показана на Figure.12.
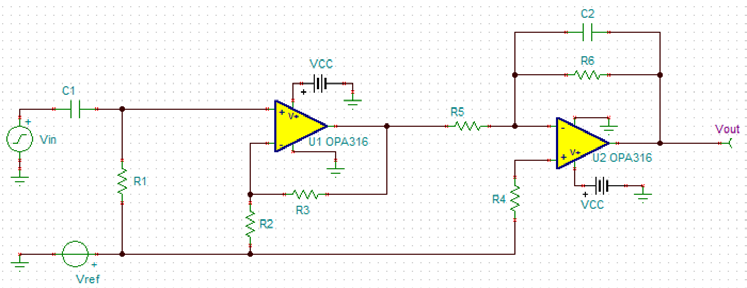
Figure 12 Схема измерения высокочастотной составляющей неисправностей
2.4.3 Коррекция фазы в низкочастотной области
Согласно вышеупомянутому анализу, интегральная схема имеет определенную ошибку фазового угла, чем ниже частота, тем больше ошибка фазового угла. Взяв схему на Figure 8 в качестве примера, при рабочей частоте 50 Гц результаты моделирования показаны на Figure 13. Зеленая кривая — входной сигнал, красная кривая — выход интегратора.
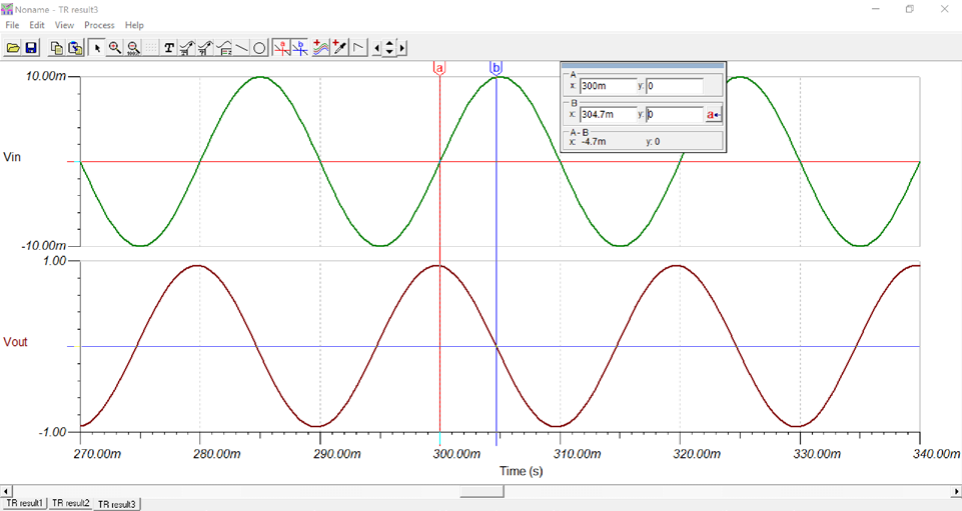
Figure 13 Анализ фазы осциллограмм интегральной схемы с инвертирующим интегрированием
Теоретически, при инвертирующем интегрировании синусоидального сигнала 50 Гц, точка перехода через ноль интегрированной формы сигнала должна отставать от входного сигнала на 90°, в временной области это проявляется в том, что точка b отстает от точки a на 5 мс. Однако как видно из Figure 13, временная разница между точками a и b составляет 4.7 мс, что в пересчете на фазовый угол составляет около 84.6°. То есть выходная форма сигнала опережает ожидаемую на около 5.4°. Как правило, в двух случаях необходимо особенно рассматривать вопрос коррекции фазы. Во-первых, когда к системе предъявляются высокие требования по фазе, например, при управлении включением/выключением выключателя, неточность фазы создает большую электрическую дугу, угрожая безопасности оборудования и людей; во-вторых, когда рабочая частота самой системы низкая, например, для электроэнергетических предприятий рабочая частота (50/60 Гц) является основной областью применения, низкая частота приводит к большой ошибке фазового угла.
Ниже проанализируем механизм возникновения ошибки фазового угла и меры коррекции. Ошибка фазового угла интегральной схемы:
Если используется схема коррекции смещения, возникает еще одна ошибка фазового угла:
\varphi_1 и \varphi_2 создают опережающий фазовый угол, поэтому требуется звено коррекции запаздывания для компенсации, как показано на Figure 14. Коррекция фазы в основном делится на активную и пассивную. Активная коррекция дает наилучший эффект, не зависящий от импеданса нагрузки, но требует добавления дополнительного операционного усилителя, что увеличивает стоимость; пассивная коррекция имеет очень низкую стоимость, но эффект коррекции зависит от импеданса нагрузки, выбор того или иного варианта обычно определяется требованиями приложения. Для обеспечения хорошего эффекта коррекции конденсаторы в интегральной схеме и схеме коррекции низких частот желательно выбирать типа C0G или NP0.
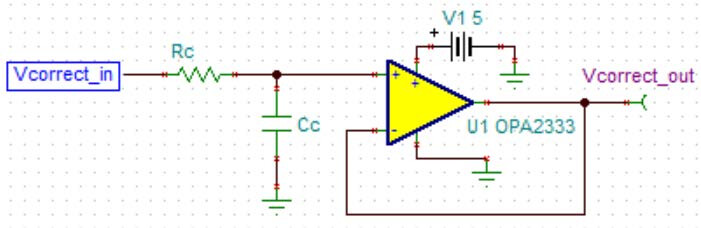
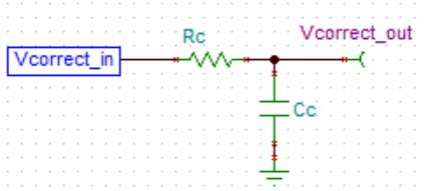
Figure 14 На левом рисунке показана активная коррекция фазы, на правом — пассивная коррекция фазы
3 Системное тестирование
3.1 Тестирование производительности
Возьмем в качестве примера применение в сетях с рабочей частотой 50 Гц, спроектирована интегральная схема с однополярным питанием, как показано на Figure 15. Ожидаемая цель проектирования — линейное изменение выходного напряжения с входным током, коэффициент пропорциональности составляет 52.4. Параметры проектирования катушки Роговского составляют 101 нГн.
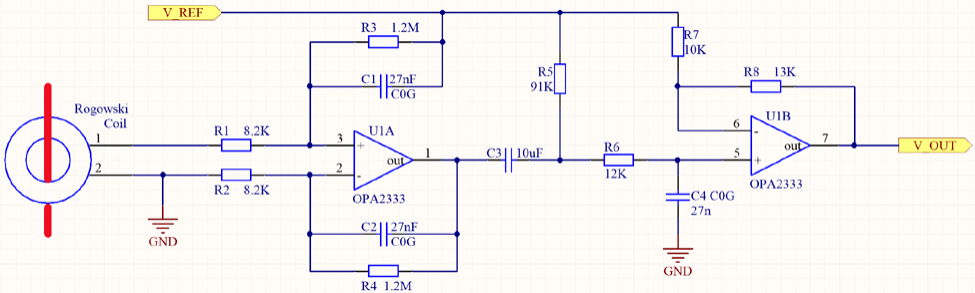
Figure 15 Принципиальная схема интегральной схемы с однополярным питанием для применения в сетях рабочей частоты
Провод с током проходит перпендикулярно через печатную катушку Роговского, из-за ограничений измерительного оборудования выходной ток невелик, поэтому увеличено число витков, среда измерения и осциллограммы показаны на Figure16.
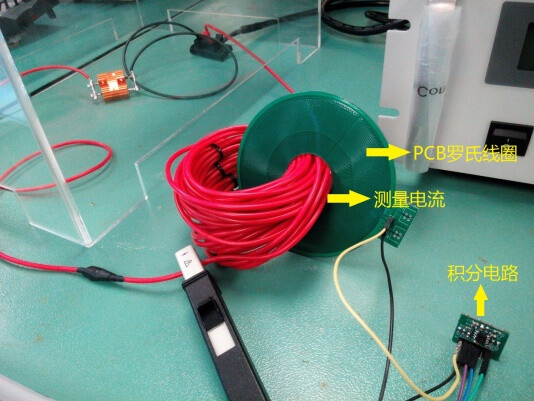
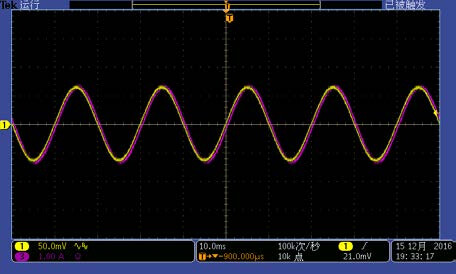
Figure 16 На левом рисунке показана среда измерения, на правом — осциллограммы измерений (фиолетовая часть — ток, желтая часть — выходное напряжение интегратора)
Как видно из правой части Figure16, форма выходного напряжения в основном совпадает с формой тока, что достигает хорошего эффекта измерения. Данные измерений представлены в Таблице 1.
Таблица 1 Данные измерений печатной катушки Роговского
| Входной ток (RMS)/A | Выходное напряжение (RMS)/мВ | Входной ток (RMS)/A | Выходное напряжение (RMS)/мВ |
|---|---|---|---|
| 0.46 | 20.95 | 2.74 | 124.8 |
| 0.92 | 42.03 | 3.26 | 148.0 |
| 1.39 | 63.02 | 3.68 | 166.8 |
| 1.83 | 83.70 | 4.01 | 185.4 |
| 2.30 | 104.6 | 4.46 | 202.5 |
Данные Таблицы 1 подвергнуты линейной аппроксимации, как показано на Figure17. Результаты показывают, что линейность между выходным напряжением и входным током очень хорошая, приблизительно соответствует следующему соотношению:
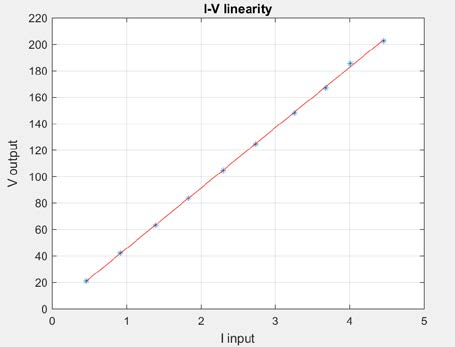
Figure 17 Линейная аппроксимация выходного напряжения и входного тока
Согласно теоретическим расчетам, соотношение между выходным напряжением и входным током:
Измеренный коэффициент 45.64 немного меньше теоретического результата 47.21, но погрешность контролируется в пределах 5%, что в основном соответствует ожидаемой цели проектирования.
3.2 Анализ погрешностей тестирования производительности и улучшенияПогрешность измерения в основном связана с относительным положением токоведущего провода и катушки. Для уменьшения погрешности обычно требуется, чтобы длинный токоведущий провод проходил перпендикулярно через центр круга катушки Роговского и чтобы изгибы провода были минимальными. В данном тесте, из-за ограничения на малую измеряемую силу тока, был использован метод увеличения числа витков для повышения эквивалентного коэффициента взаимной индукции катушки. Поэтому токоведущий провод не полностью проходил через центр катушки, и существовали значительные изгибы кабеля. В результате фактический коэффициент взаимной индукции катушки оказался меньше теоретического значения, но разница невелика и в основном соответствует цели проектирования.
3.3 Тест на помехи
При измерении тока катушкой Роговского измеряемый ток должен проходить через центральное отверстие катушки. Однако в реальных условиях эксплуатации вокруг измеряемого тока обычно присутствуют и другие переменные токи (например, в случае трехфазной передачи переменного тока). Согласно принципу работы катушки Роговского, внешние переменные токи также могут создавать в катушке переменное магнитное поле, создавая помехи измеряемому току. Поэтому анализ помехозащищенности катушки Роговского от окружающих токов становится необходимым.
Основной процесс тестирования на помехи заключается в следующем: сначала в отсутствие помех измеряется соответствие между выходным напряжением и измеряемым током. Затем вокруг измеряемого тока (то есть вне катушки) добавляется помехообразующий ток, и проверяется, изменяется ли интегрированное выходное напряжение при том же измеряемом токе. Согласно этой концепции, среда измерения для теста на помехи катушки Роговского показана на Figure18.
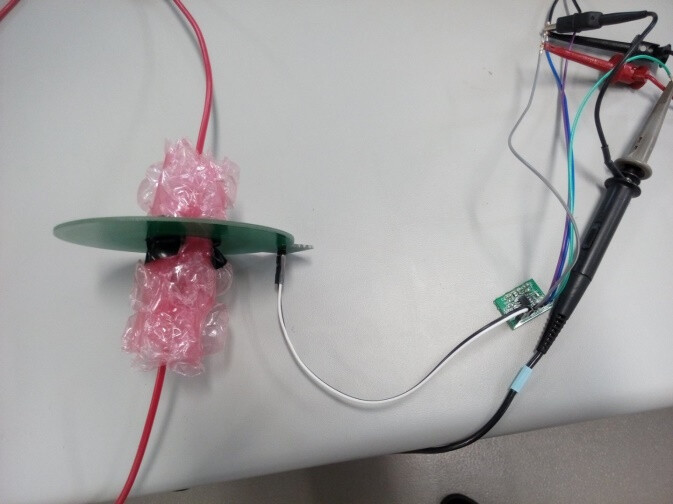
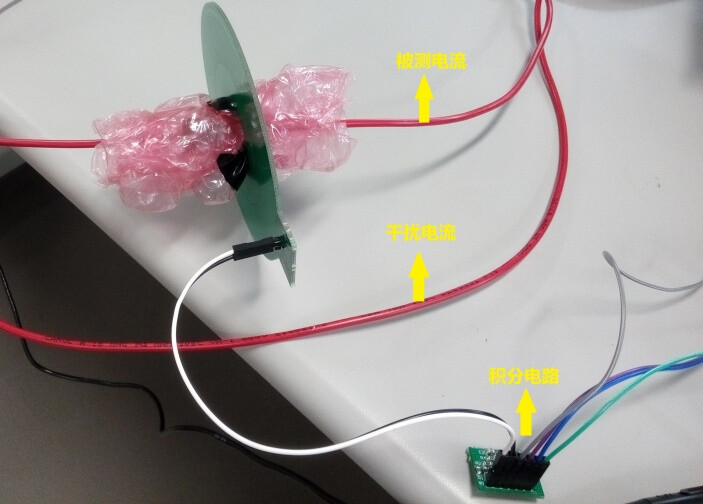
Figure 18 Слева показана среда измерения без помехообразующего тока, справа — среда измерения с помехообразующим током
Из-за ограничений измерительной площадки, где невозможно обеспечить большой помехообразующий ток, для достижения лучшего эффекта помех число витков измеряемого тока не увеличивалось, а помехообразующий ток сделан сопоставимым по величине с измеряемым током. В качестве компенсации за отсутствие увеличения числа витков в тесте на помехи был увеличен коэффициент усиления интегрирующей схемы (R7 на Figure15 изменен на 100 Ом). Следует отметить, что слишком большой коэффициент усиления влечет за собой некоторые недостатки, такие как увеличение смещения (offset) на выходе и увеличение отклонения фактического коэффициента усиления от проектного значения. Поэтому в практических приложениях не рекомендуется выбирать большие коэффициенты усиления. Однако в данном тесте на помехозащищенность нас больше интересует влияние помехового сигнала на измеряемый сигнал при фиксированной схеме, поэтому влияние большого усиления невелико.
Волны интегрированного выходного напряжения, измеренные при наличии и отсутствии помехообразующего тока, показаны на Figure19.
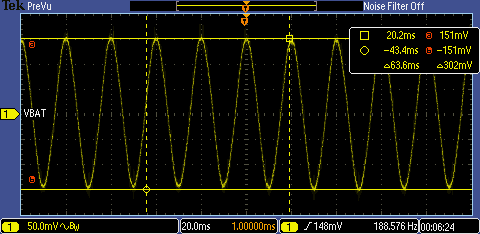
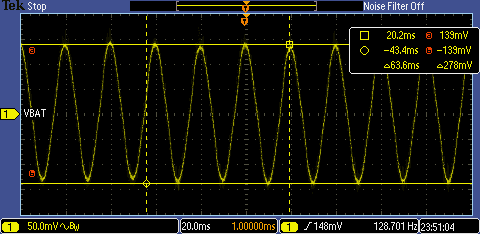
Figure 19 Слева показана форма выходного напряжения без помехообразующего тока, справа — форма выходного напряжения с помехообразующим током
Далее тестовые данные систематизированы в Table2.
Table 2 Данные теста на помехи
| Измеряемый ток (RMS)/А | Помехообразующий ток (RMS)/А | Выходное напряжение без помехообразующего тока (RMS)/мВ | Выходное напряжение с помехообразующим током (RMS)/мВ | Погрешность % |
|---|---|---|---|---|
| 0,41 | 0,41 | 21,9 | 20,6 | -5,9 % |
| 0,82 | 0,81 | 43,1 | 38,9 | -9,7 % |
| 1,23 | 1,22 | 65,1 | 58,5 | -10,1 % |
| 1,64 | 1,63 | 83,4 | 78,5 | -5,9 % |
| 2,06 | 2,04 | 106,1 | 98,3 | -7,4 % |
Как видно из Table2, введение помехообразующего тока ослабляет амплитуду выходного напряжения, что приводит к погрешности измерения. В данном тесте погрешность составляет около 10 %.
3.4 Анализ погрешности теста на помехи и улучшения
Когда вокруг катушки Роговского присутствует помехообразующий ток, изменение этого тока создает переменное магнитное поле, которое индуцирует ЭДС в катушке Роговского, и это является корневой причиной погрешности измерения. Величина погрешности измерения зависит как от значения помехообразующего тока, так и от расстояния между помехообразующим током и измеряемым током. В данном тесте помеховый сигнал очень велик, сопоставим по величине с измеряемым сигналом, и расстояние между помеховым сигналом и катушкой Роговского невелико, что привело к значительной погрешности измерения. При фактических измерениях следует обращать внимание на удаление помехообразующего тока от катушки Роговского и, при возможности, уменьшать помехообразующий ток, чтобы снизить погрешность измерения.
4 Список литературы
- TI-Design-01063, High Accuracy AC Current Measurement Reference Design Using PCB Rogowski Coil Sensor, Texas Instruments Inc.
- OPA2333 datasheet 2016, Texas Instruments Inc.