硬件环境: Raspberry Pi 4 Model B Rev 1.5 · Debian 12 Bookworm · 内核 6.12.25
测试日期: 2026 年 4 月
作者: zeruns (https://blog.zeruns.com/)
本文由AI编写的,仅供参考(Hermes Agent + DeepSeek V4 Flash)
目录
1. GPIO 基础概念
1.1 什么是 GPIO
GPIO(General Purpose Input/Output,通用输入输出)是微处理器上的一组可编程引脚。通过软件控制,你可以将每个引脚设置为:
- 输出模式:输出高电平(3.3V)或低电平(0V),用于控制 LED、继电器、蜂鸣器等
- 输入模式:读取外部电平状态(高/低),用于读取按钮、传感器信号
- 复用功能:I2C、SPI、UART、PWM 等专用通信协议
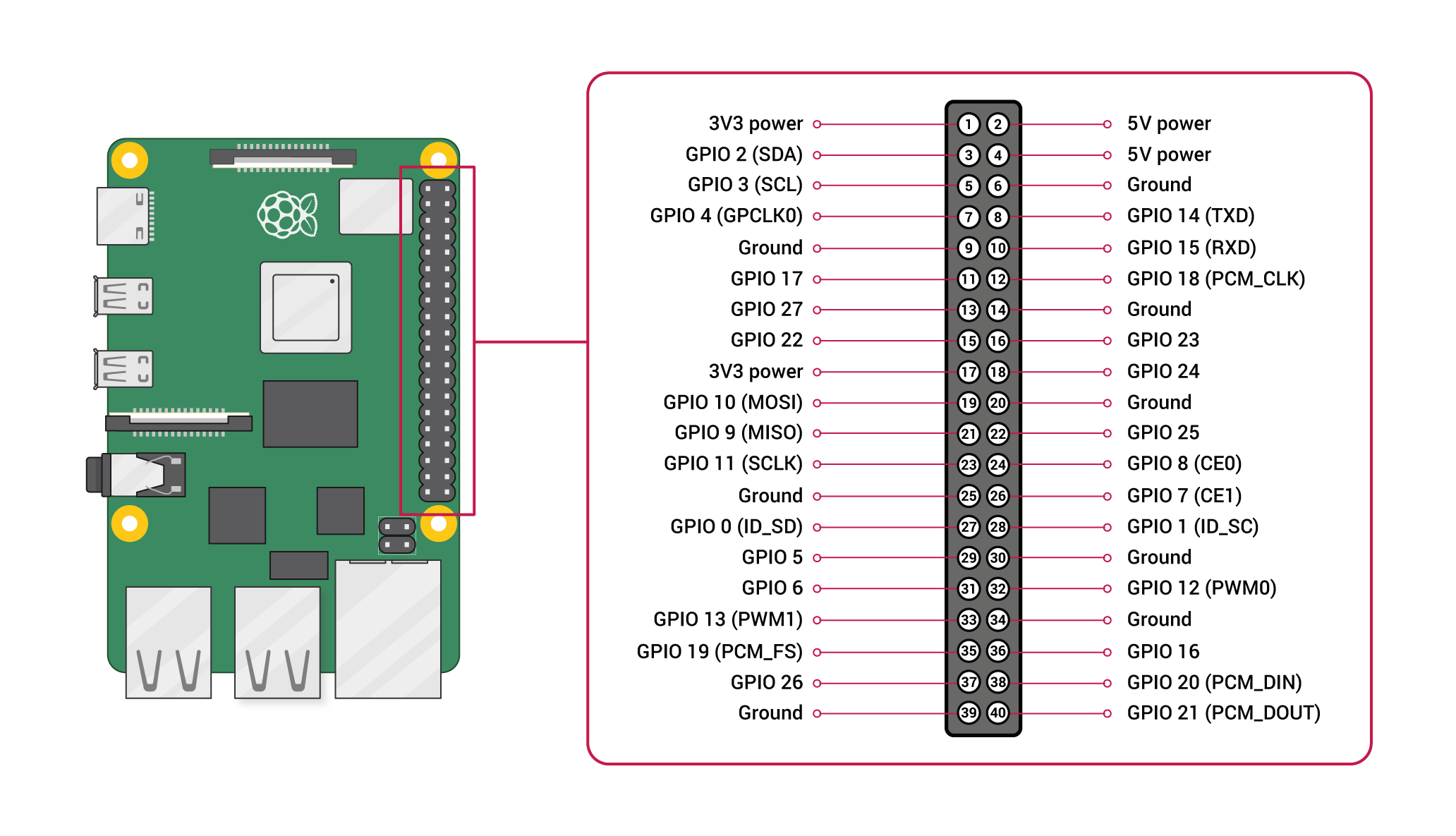
1.2 树莓派 4B 引脚排列
树莓派 4B 采用 40 Pin 扩展排针,引脚编号有三种方式:
| 编号方式 | 说明 | 典型库 |
|---|---|---|
| 物理引脚(Board) | 从 1 到 40,左上为 1 | RPi.GPIO setmode(GPIO.BOARD) |
| BCM 编号(Broadcom) | 芯片 GPIO 编号,如 GPIO17 | RPi.GPIO setmode(GPIO.BCM)、libgpiod |
| wiringPi 编号 | wiringPi 自定义编号(已废弃) | wiringPi 库 |
40 Pin 引脚功能表
┌─────────────────────────────┐
│ 🥝 树莓派 4B 40Pin 引脚图 │
3.3V (01) ──● ●── (02) 5V │
GPIO2 (03) ──● ●── (04) 5V │
GPIO3 (05) ──● ●── (06) GND │
GPIO4 (07) ──● ●── (08) GPIO14 (UART TX) │
GND (09) ──● ●── (10) GPIO15 (UART RX) │
GPIO17 (11) ──● ●── (12) GPIO18 (PWM0) │
GPIO27 (13) ──● ●── (14) GND │
GPIO22 (15) ──● ●── (16) GPIO23 │
3.3V (17) ──● ●── (18) GPIO24 │
GPIO10 (19) ──● ●── (20) GND (SPI_MOSI) │
GPIO9 (21) ──● ●── (22) GPIO25 (SPI_MISO) │
GPIO11 (23) ──● ●── (24) GPIO8 (SPI_SCLK) │
GND (25) ──● ●── (26) GPIO7 (SPI_CE0) │
GPIO0 (27) ──● ●── (28) GPIO1 (ID_SDA / I2C) │
GPIO5 (29) ──● ●── (30) GND │
GPIO6 (31) ──● ●── (32) GPIO12 (PWM0) │
GPIO13 (33) ──● ●── (34) GND │
GPIO19 (35) ──● ●── (36) GPIO16 │
GPIO26 (37) ──● ●── (38) GPIO20 │
GND (39) ──● ●── (40) GPIO21 │
└─────────────────────────────┘
树莓派 4B 主要引脚功能表
| 物理引脚 | BCM 编号 | 功能 | 物理引脚 | BCM 编号 | 功能 |
|---|---|---|---|---|---|
| 1 | — | 3.3V | 2 | — | 5V |
| 3 | GPIO2 | I2C1 SDA | 4 | — | 5V |
| 5 | GPIO3 | I2C1 SCL | 6 | — | GND |
| 7 | GPIO4 | — | 8 | GPIO14 | UART TX |
| 9 | — | GND | 10 | GPIO15 | UART RX |
| 11 | GPIO17 | — | 12 | GPIO18 | PCM_CLK / PWM0 |
| 13 | GPIO27 | — | 14 | — | GND |
| 15 | GPIO22 | — | 16 | GPIO23 | — |
| 17 | — | 3.3V | 18 | GPIO24 | — |
| 19 | GPIO10 | SPI0 MOSI | 20 | — | GND |
| 21 | GPIO9 | SPI0 MISO | 22 | GPIO25 | — |
| 23 | GPIO11 | SPI0 SCLK | 24 | GPIO8 | SPI0 CE0 |
| 25 | — | GND | 26 | GPIO7 | SPI0 CE1 |
| 27 | GPIO0 | ID_SDA (EEPROM) | 28 | GPIO1 | ID_SCL (EEPROM) |
| 29 | GPIO5 | — | 30 | — | GND |
| 31 | GPIO6 | — | 32 | GPIO12 | PWM0 |
| 33 | GPIO13 | PWM1 | 34 | — | GND |
| 35 | GPIO19 | PCM_FS / PWM1 | 36 | GPIO16 | — |
| 37 | GPIO26 | — | 38 | GPIO20 | PCM_DIN |
| 39 | — | GND | 40 | GPIO21 | PCM_DOUT |
1.3 重要说明
- 逻辑电平: 树莓派 GPIO 是 3.3V 逻辑,不能直接接 5V 信号
- 电流限制: 每个 GPIO 最大输出约 16mA,所有引脚合计不超过 50mA
- 默认状态: 大部分 GPIO 默认是输入模式,部分有内部上拉/下拉
- 3.3V 引脚(01/17): 最大输出电流约 500mA
- 5V 引脚(02/04): 直接从 USB-C 供电取电,电流取决于电源适配器
2. 环境准备与工具
2.1 已安装的工具清单
本教程基于 Debian 12 Bookworm 系统进行测试,以下工具已预装:
| 工具/库 | 版本 | 用途 |
|---|---|---|
| libgpiod / gpioset / gpioget | 1.6.3 | Shell 方式控制 GPIO |
| python3-libgpiod | 1.6.3 | Python libgpiod 绑定 |
| RPi.GPIO | 0.7.2 | 经典 Python GPIO 库 |
| smbus2 | 已安装 | Python I2C 通信 |
| spidev | 已安装 | Python SPI 通信 |
| pigpiod | 1.79 | GPIO 守护进程(PWM/远程控制) |
| i2c-tools | 4.3 | I2C 设备扫描工具 |
2.2 安装所需工具
如果某些工具未安装,可以按以下命令安装:
# 基础 GPIO 工具
sudo apt install gpiod libgpiod-dev python3-libgpiod
# I2C 工具
sudo apt install i2c-tools
# Python 库
pip install RPi.GPIO smbus2 spidev gpiozero
# pigpio 守护进程(硬件 PWM,推荐)
sudo apt install pigpio pigpiod
sudo systemctl enable pigpiod --now
2.3 开启 I2C / SPI 接口
使用 raspi-config 开启:
sudo raspi-config
菜单路径:
Interface Options → I2C → Enable → Yes
Interface Options → SPI → Enable → Yes
或者在终端直接编辑 /boot/firmware/config.txt(Debian 12):
# 手动添加
sudo tee -a /boot/firmware/config.txt <<EOF
dtparam=i2c_arm=on
dtparam=spi=on
EOF
# 重启生效
sudo reboot
验证开启成功:
# 检查 I2C
ls /dev/i2c*
# 输出: /dev/i2c-20 /dev/i2c-21
# 检查 SPI(开启后)
ls /dev/spi*
# 输出: /dev/spidev0.0 /dev/spidev0.1
2.4 查看所有 gpiochip
$ gpioinfo
gpiochip0 - 58 lines:
line 0: "ID_SDA" unused input active-high
line 1: "ID_SCL" unused input active-high
line 2: "GPIO2" unused input active-high
...
树莓派 4B 的 BCM2711 芯片提供一个 gpiochip0,共 58 个 GPIO,但只有 GPIO0-GPIO27 通过 40Pin 排针引出。
3. GPIO 输入输出(Shell 方式)
3.1 libgpiod 工具包
推荐使用 libgpiod 的工具,它不依赖 wiringPi,是当今主流方案。
主要命令:
| 命令 | 功能 | 示例 |
|---|---|---|
gpioinfo |
查看所有 GPIO 状态 | gpioinfo |
gpioset |
设置 GPIO 输出电平 | gpioset 0 17=1 |
gpioget |
读取 GPIO 输入电平 | gpioget 0 17 |
gpiomon |
监听 GPIO 事件 | gpiomon 0 17 |
格式说明:
gpioset <chip> <pin>=<value>
chip 通常为 0(gpiochip0),pin 为 BCM 编号
3.2 输出:点亮 LED
将 LED 正极(长脚)通过 330Ω 电阻 连接到 GPIO17(物理引脚 11),负极(短脚)连接到 GND(物理引脚 9)。
# 设置 GPIO17 输出高电平 → LED 点亮
gpioset 0 17=1
# 设置 GPIO17 输出低电平 → LED 熄灭
gpioset 0 17=0
3.3 输入:读取按键状态
将按键一端接 GPIO18(物理引脚 12),另一端接 GND(物理引脚 14)。
# 读取 GPIO18 电平(需外部上拉或启用内部上拉)
gpioget 0 18
# 输出: 1 (未按下,高电平)
# 输出: 0 (按下,低电平)
3.4 查看所有引脚状态
# 查看全部引脚
gpioinfo
# 查看特定引脚(BCM 编号 17)
gpioinfo | grep "GPIO17"
# 输出: line 17: "GPIO17" "myapp" output active-high
3.5 gpioset 设置上拉/下拉
libgpiod 1.6 支持在请求时设置偏置:
# 设置 GPIO17 为输出,初始高电平,带上拉
gpioset --bias=enable 0 17=1
4. GPIO 输入输出(Python 方式)
4.1 使用 RPi.GPIO(经典库)
RPi.GPIO 是最常用的 Python GPIO 库,简单直观。
4.1.1 输出:LED 闪烁
import RPi.GPIO as GPIO
import time
# 使用 BCM 编号方式
GPIO.setmode(GPIO.BCM)
# 设置 GPIO17 为输出
GPIO.setup(17, GPIO.OUT)
# LED 闪烁 5 次
for _ in range(5):
GPIO.output(17, GPIO.HIGH) # 点亮
time.sleep(0.5)
GPIO.output(17, GPIO.LOW) # 熄灭
time.sleep(0.5)
# 清理资源
GPIO.cleanup()
4.1.2 输入:读取按键
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BCM)
# GPIO18 为输入,启用内部上拉电阻
GPIO.setup(18, GPIO.IN, pull_up_down=GPIO.PUD_UP)
try:
while True:
if GPIO.input(18) == GPIO.LOW:
print("按钮按下")
else:
print("按钮松开")
time.sleep(0.1)
except KeyboardInterrupt:
GPIO.cleanup()
GPIO.PUD_UP= 内部上拉(默认高电平,按下变低)
GPIO.PUD_DOWN= 内部下拉(默认低电平,按下变高)
4.1.3 PWM 输出:呼吸灯
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BCM)
GPIO.setup(18, GPIO.OUT) # GPIO18 支持硬件 PWM
pwm = GPIO.PWM(18, 1000) # 频率 1kHz
pwm.start(0) # 初始占空比 0%
try:
while True:
# 渐亮
for duty in range(0, 101, 5):
pwm.ChangeDutyCycle(duty)
time.sleep(0.05)
# 渐暗
for duty in range(100, -1, -5):
pwm.ChangeDutyCycle(duty)
time.sleep(0.05)
except KeyboardInterrupt:
pwm.stop()
GPIO.cleanup()
4.1.4 事件检测:中断方式读取按键
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BCM)
GPIO.setup(18, GPIO.IN, pull_up_down=GPIO.PUD_UP)
def button_callback(channel):
print(f"按钮按下!(引脚 {channel})")
# 下降沿触发中断
GPIO.add_event_detect(18, GPIO.FALLING,
callback=button_callback,
bouncetime=200)
try:
print("等待按钮按下...")
time.sleep(60)
except KeyboardInterrupt:
GPIO.cleanup()
4.2 使用 gpiozero(高级封装)
gpiozero 提供了更高级的面向对象封装,适合快速开发:
# 安装
pip install gpiozero
from gpiozero import LED, Button, Buzzer
from signal import pause
# LED:自动闪烁
led = LED(17)
led.blink()
# 按钮:按下时点亮 LED
btn = Button(18, pull_up=True)
# 方法 1:直接赋值
btn.when_pressed = led.on
btn.when_released = led.off
# 方法 2:自定义回调
btn.when_pressed = lambda: print("按下!")
# 保持运行
pause()
gpiozero 内置的组件:
| 组件 | 类名 | 说明 |
|---|---|---|
| LED | LED(pin) |
控制 LED 开关/闪烁/呼吸 |
| 按钮 | Button(pin, pull_up=True) |
读取按键、长按检测 |
| 蜂鸣器 | Buzzer(pin) |
有源蜂鸣器控制 |
| 距离传感器 | DistanceSensor(echo, trigger) |
HC-SR04 超声波 |
| 舵机 | Servo(pin) |
舵机角度控制 |
| 电机 | Motor(forward, backward) |
直流电机控制 |
4.3 使用 libgpiod Python 绑定(底层操作)
import gpiod
import time
# 打开 gpiochip0
chip = gpiod.Chip('gpiochip0')
# 获取 GPIO17 并请求为输出
line = chip.get_line(17)
line.request(consumer='myapp', type=gpiod.LINE_REQ_DIR_OUT)
# 输出高电平
line.set_value(1)
time.sleep(1)
# 输出低电平
line.set_value(0)
# 释放
line.release()
输入模式:
import gpiod
chip = gpiod.Chip('gpiochip0')
line = chip.get_line(18)
# 请求为输入,内部上拉
line.request(consumer='myapp',
type=gpiod.LINE_REQ_DIR_IN,
flags=gpiod.LINE_REQ_FLAG_BIAS_PULL_UP)
value = line.get_value() # 0 或 1
print(f"GPIO18 = {value}")
line.release()
5. I2C 通信
5.1 I2C 基本原理
I2C(Inter-Integrated Circuit)是一种串行通信总线,使用两条线:
| 信号 | 引脚 | 功能 |
|---|---|---|
| SCL | GPIO3 (物理引脚 5) | 时钟线 |
| SDA | GPIO2 (物理引脚 3) | 数据线 |
特点:
- 主从架构:树莓派是主机(Master),传感器等是从机(Slave)
- 7位地址:每个从机有唯一地址(如 0x44)
- 多设备共享:一条 I2C 总线上可挂接多个设备
- 速率:标准 100kHz,快速 400kHz
5.2 查看 I2C 总线
# 查看 I2C 总线列表
$ i2cdetect -l
i2c-20 i2c bcm2711_i2c1 I2C adapter
i2c-21 i2c bcm2711_i2c0 I2C adapter
i2c-20:对应物理引脚 3(SDA)/5(SCL) — 主 I2C 总线i2c-21:对应 ID_EEPROM(引脚 27/28),一般不接外部设备
5.3 扫描 I2C 设备
# 扫描 i2c-20 上的设备
$ i2cdetect -y 20
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- 44 -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --
地址
0x44处有一个设备 — 这就是 SHT30 温湿度传感器(I2C 地址 0x44)。
如果没看到任何设备(全是 --),说明总线上没有挂载设备。
5.4 使用 smbus2 读写 I2C
smbus2 是最常用的 Python I2C 库。
5.4.1 读取 SHT30 温湿度传感器
import smbus2
import time
# SHT30 I2C 地址
SHT30_ADDR = 0x44
# 打开 I2C 总线 20
bus = smbus2.SMBus(20)
# 发送测量命令:高精度模式
bus.write_i2c_block_data(SHT30_ADDR, 0x2C, [0x06])
time.sleep(0.015) # 等待测量完成(15ms)
# 读取 6 字节数据
data = bus.read_i2c_block_data(SHT30_ADDR, 0x00, 6)
# 计算温度和湿度
temp_raw = ((data[0] << 8) | data[1])
temp = -45 + 175 * temp_raw / 65535.0
hum_raw = ((data[3] << 8) | data[4])
hum = 100 * hum_raw / 65535.0
print(f"温度: {temp:.2f}°C")
print(f"湿度: {hum:.2f}%")
5.4.2 封装为函数
import smbus2
import time
class SHT30:
def __init__(self, bus_id=20, addr=0x44):
self.bus = smbus2.SMBus(bus_id)
self.addr = addr
def read(self):
"""读取温湿度,返回 (温度°C, 湿度%)"""
self.bus.write_i2c_block_data(self.addr, 0x2C, [0x06])
time.sleep(0.015)
data = self.bus.read_i2c_block_data(self.addr, 0x00, 6)
temp_raw = (data[0] << 8) | data[1]
temp = -45 + 175 * temp_raw / 65535.0
hum_raw = (data[3] << 8) | data[4]
hum = 100 * hum_raw / 65535.0
return round(temp, 2), round(hum, 2)
# 使用
sensor = SHT30()
t, h = sensor.read()
print(f"{t}°C, {h}%RH")
5.4.3 通用 I2C 读写操作
import smbus2
bus = smbus2.SMBus(20)
addr = 0x44 # 设备 I2C 地址
# 写单个字节到寄存器
bus.write_byte_data(addr, 0x2C, 0x06)
# 读单字节
value = bus.read_byte_data(addr, 0x00)
# 读多字节
data = bus.read_i2c_block_data(addr, 0x00, 6)
# 写多字节
bus.write_i2c_block_data(addr, 0x2C, [0x06])
# 写一个字节(无寄存器地址)
bus.write_byte(addr, 0x06)
# 读一个字节(无寄存器地址)
value = bus.read_byte(addr)
bus.close()
5.5 使用 i2cget / i2cset 命令行
# 读取 SHT30 状态寄存器(1字节)
$ i2cget -y 20 0x44 0x00
0x65
# 读取 6 字节原始数据
$ i2cget -y 20 0x44 0x00 b 6
6. SPI 通信
6.1 SPI 基本原理
SPI(Serial Peripheral Interface)是一种全双工同步串行总线,使用四条线:
| 信号 | 树莓派引脚 | 功能 |
|---|---|---|
| MOSI | GPIO10 (物理引脚 19) | 主机输出,从机输入 |
| MISO | GPIO9 (物理引脚 21) | 主机输入,从机输出 |
| SCLK | GPIO11 (物理引脚 23) | 时钟信号 |
| CE0 | GPIO8 (物理引脚 24) | 片选 0 |
| CE1 | GPIO7 (物理引脚 26) | 片选 1 |
特点:
- 全双工:发送和接收同时进行
- 主从:树莓派是主机,可挂接多个从机(每个从机一个片选)
- 速率高:可达几十 MHz
- 无设备地址:通过片选线选择从机
6.2 开启 SPI 并验证
# 开启 SPI(已开启后)
$ ls /dev/spi*
/dev/spidev0.0 /dev/spidev0.1
/dev/spidev0.0:SPI0 总线,CE0/dev/spidev0.1:SPI0 总线,CE1
6.3 使用 spidev 读写 SPI
pip install spidev
6.3.1 读取 MCP3008 ADC(8通道 ADC)
import spidev
# 打开 SPI
spi = spidev.SpiDev()
spi.open(0, 0) # 总线0,片选0
# 配置
spi.max_speed_hz = 1350000 # 1.35MHz
spi.mode = 0 # SPI 模式
def read_adc(channel):
"""读取 MCP3008 指定通道 (0-7)"""
# 发送 3 字节:起始位 + 单端模式 + 通道号
r = spi.xfer2([1, (8 + channel) << 4, 0])
value = ((r[1] & 3) << 8) + r[2]
return value
# 读取通道 0
adc_value = read_adc(0)
voltage = adc_value * 3.3 / 1023
print(f"ADC值: {adc_value}, 电压: {voltage:.3f}V")
spi.close()
6.3.2 通用 SPI 数据收发
import spidev
spi = spidev.SpiDev()
spi.open(0, 0)
spi.max_speed_hz = 500000
spi.mode = 0
# 发送并接收(全双工,发送0xFF同时读取)
data_out = [0xFF, 0x00, 0x55]
data_in = spi.xfer2(data_out) # 发送3个字节,接收3个字节
print(f"发送: {[hex(x) for x in data_out]}")
print(f"接收: {[hex(x) for x in data_in]}")
# 只发送(忽略接收结果)
spi.writebytes([0x01, 0x02, 0x03])
spi.close()
7. 综合实例
7.1 实例1:LED 呼吸灯 + 按钮控制
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BCM)
LED_PIN = 17 # BCM 17
BTN_PIN = 18 # BCM 18
GPIO.setup(LED_PIN, GPIO.OUT)
GPIO.setup(BTN_PIN, GPIO.IN, pull_up_down=GPIO.PUD_UP)
pwm = GPIO.PWM(LED_PIN, 500)
pwm.start(0)
running = True # LED 状态
try:
while True:
if GPIO.input(BTN_PIN) == GPIO.LOW:
running = not running
time.sleep(0.3) # 去抖动
if running:
# 呼吸灯
for duty in range(0, 101, 2):
pwm.ChangeDutyCycle(duty)
time.sleep(0.01)
for duty in range(100, -1, -2):
pwm.ChangeDutyCycle(duty)
time.sleep(0.01)
else:
pwm.ChangeDutyCycle(0)
except KeyboardInterrupt:
pwm.stop()
GPIO.cleanup()
7.2 实例2:SHT30 温湿度读取 + 自动记录
import smbus2
import time
import csv
from datetime import datetime
class SHT30:
def __init__(self, bus_id=20, addr=0x44):
self.bus = smbus2.SMBus(bus_id)
self.addr = addr
def read(self):
self.bus.write_i2c_block_data(self.addr, 0x2C, [0x06])
time.sleep(0.015)
data = self.bus.read_i2c_block_data(self.addr, 0x00, 6)
t = -45 + 175 * ((data[0] << 8) | data[1]) / 65535.0
h = 100 * ((data[3] << 8) | data[4]) / 65535.0
return round(t, 2), round(h, 2)
sensor = SHT30()
# 测试读取
t, h = sensor.read()
print(f"[{datetime.now()}] 温度: {t}°C, 湿度: {h}%")
# 持续记录到 CSV(每分钟一次)
with open('sensor_log.csv', 'w', newline='') as f:
writer = csv.writer(f)
writer.writerow(['时间', '温度(C)', '湿度(%)'])
for i in range(10): # 记录10次
t, h = sensor.read()
now = datetime.now().strftime('%H:%M:%S')
writer.writerow([now, t, h])
print(f"[{now}] {t}°C, {h}%")
time.sleep(60)
7.3 实例3:gpiozero 一键完成
from gpiozero import LED, Button
from signal import pause
import time
led = LED(17)
btn = Button(18, pull_up=True)
# 按下时点亮,松开熄灭
btn.when_pressed = led.on
btn.when_released = led.off
# 双击切换闪烁模式
press_count = 0
def double_click():
global press_count
press_count += 1
time.sleep(0.3)
if press_count == 2:
led.blink()
print("双击!LED 闪烁模式")
press_count = 0
btn.when_pressed = double_click
pause()
8. 注意事项与排错
8.1 电平转换 (3.3V vs 5V)
树莓派 GPIO 是 3.3V 逻辑,严禁直接连接 5V 设备!
| 场景 | 做法 |
|---|---|
| 5V 传感器输出 → 树莓派输入 | 使用 电平转换模块(如 TXS0108E)或 电阻分压 |
| 树莓派输出 → 5V 设备输入 | 部分 5V 设备可识别 3.3V 为高电平(如 WS2812B) |
| 3.3V 传感器 → 树莓派 | 可直接连接 |
电阻分压(5V → 3.3V):
5V ──┬── R1 (1.8kΩ) ──┬── 树莓派 GPIO
│ │
GND ── R2 (3.3kΩ) ─┘
8.2 上拉/下拉电阻
- 内部上拉:RPi.GPIO 用
pull_up_down=GPIO.PUD_UP - 内部下拉:RPi.GPIO 用
pull_up_down=GPIO.PUD_DOWN - libgpiod:
gpiod.LINE_REQ_FLAG_BIAS_PULL_UP - 外部上拉:4.7kΩ ~ 10kΩ 电阻到 3.3V
8.3 电流限制
| 参数 | 限制 |
|---|---|
| 单个 GPIO 最大输出 | 16mA |
| 所有 GPIO 总和 | 50mA |
| 3.3V 引脚总电流 | ~500mA |
| 5V 引脚总电流 | 取决于电源 |
直接驱动 LED 时必须串联 220Ω ~ 330Ω 限流电阻!
8.4 常见错误
| 错误 | 原因 | 解决方法 |
|---|---|---|
RuntimeError: No access to /dev/mem |
权限不足 | sudo python3 script.py |
RuntimeError: Pin already in use |
引脚被其他程序占用 | 检查 /sys/class/gpio/,释放或重启 |
[Errno 13] Permission denied + i2c |
I2C 未开启或权限不足 | 将用户加入 i2c 组 |
Could not open /dev/spidev0.0 |
SPI 未开启 | 检查 /boot/config.txt |
| LED 接反不亮 | 正负极接反 | LED 长脚接 GPIO,短脚接 GND |
| 按键误触发 | 未做去抖动 | 代码加 bouncetime 或延时去抖 |
8.5 权限设置
# 将当前用户加入 i2c、gpio 组
sudo usermod -aG i2c,gpio $USER
# 重新登录生效
exec su - $USER
8.6 快速在线参考
作者: zeruns
本教程基于树莓派 4B + Debian 12 Bookworm 实测编写