https://oshwhub.com/zeruns/ji-yu-stm32-de-buck-boost-xing-shu-zi-dian-yuan 正在复刻学习这个项目,其中代码里PID部分,有三个模式:BUCK,BOOST和MIX,但是我发现只有MIX模式里有IErr1 = IErr0;(电流环PID的历史误差更新)
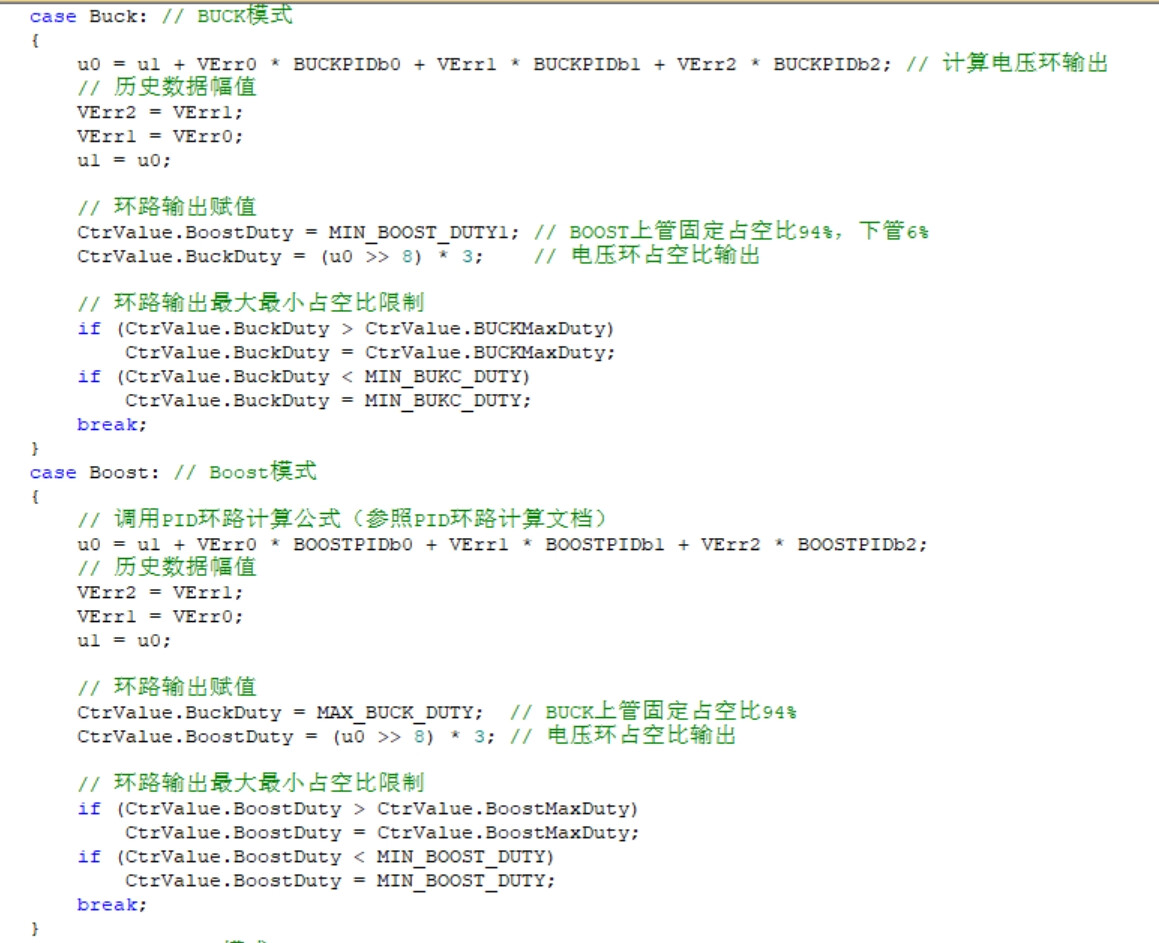
(BUCK和BOOST模式的代码图,在备注(// 历史数据幅值)处没有IErr1 = IErr0;)
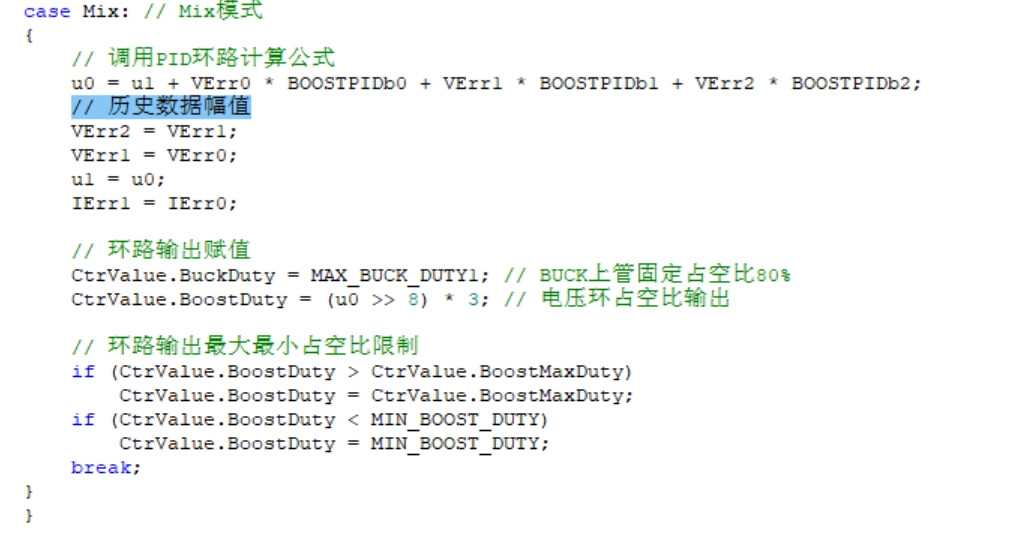
MIX模式代码图,在备注(// 历史数据幅值)处有IErr1 = IErr0;)这里不太理解为什么只有在MIX模式才做电流环的历史误差更新